|
I am currently a Ph.D. student in School of Software, Tsinghua University, advised by Prof. Yu-Shen Liu. My research interests lie in the area of 3D computer vision and graphics, especially in generative models, 3D foundation models, 3D reconstruction and cross-modal learning. |

|
|
|
|
|
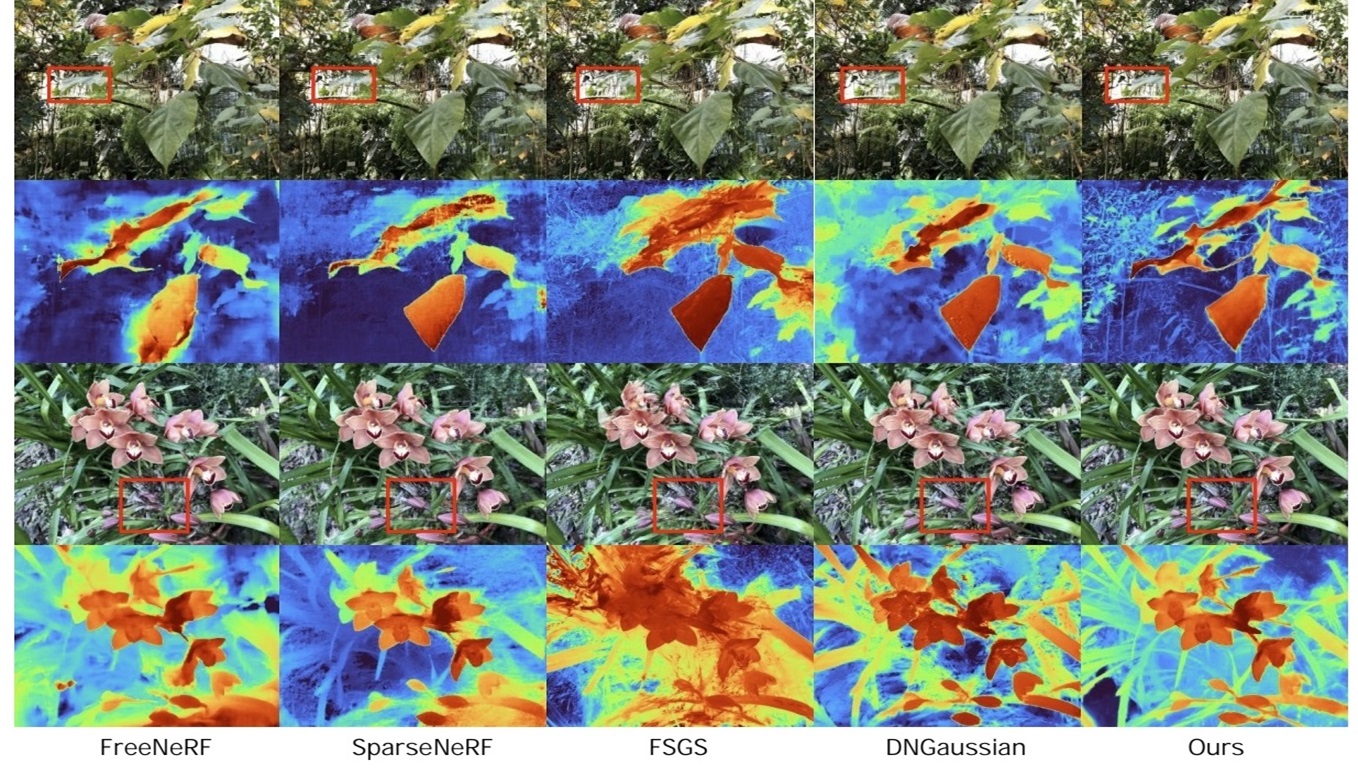
Junsheng Zhou*, Weiqi Zhang*, Yu-Shen Liu Conference on Neural Information Processing Systems (NeurIPS), 2024 project page | arXiv | code Introducing a powerful 3D generative model that generates Gaussian primitives in arbitrary numbers by functionally disentangling Gaussian Splatting. |
|
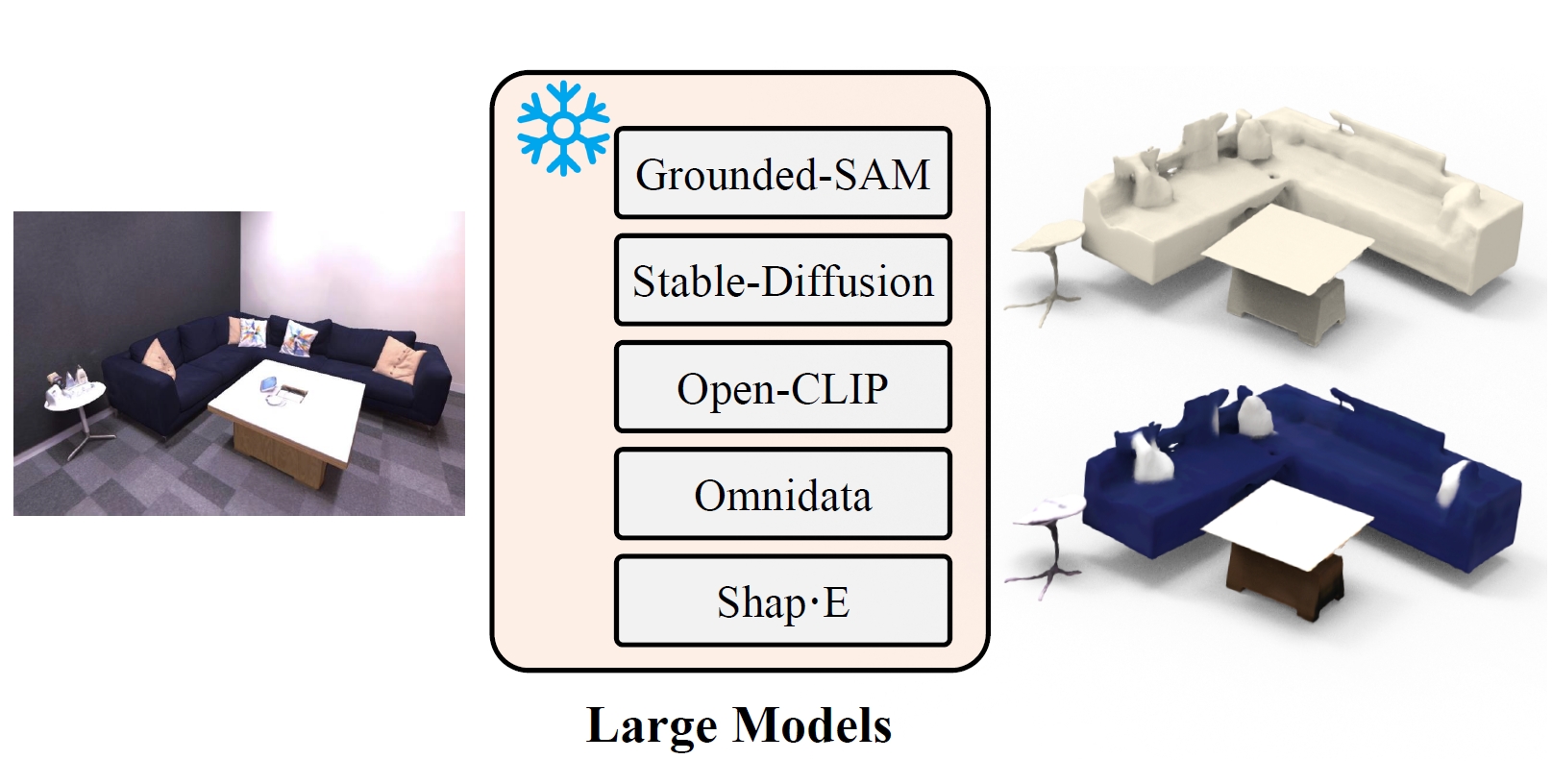
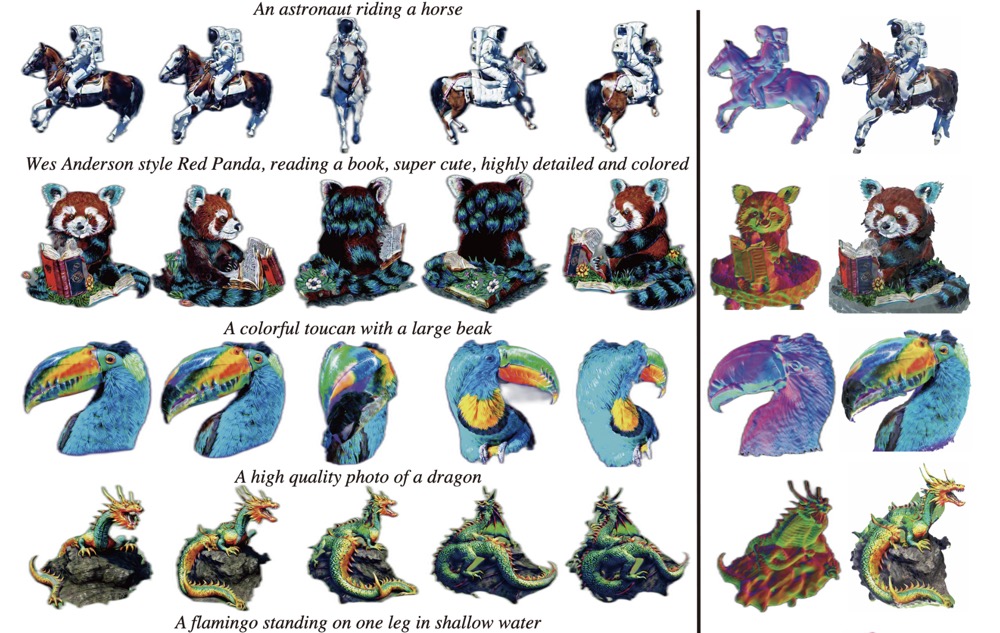
Junsheng Zhou, Yu-Shen Liu, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2024 project page | arXiv | code We propose to assemble diverse deep priors from large models for scene generation from single images in a zero shot manner. |
|
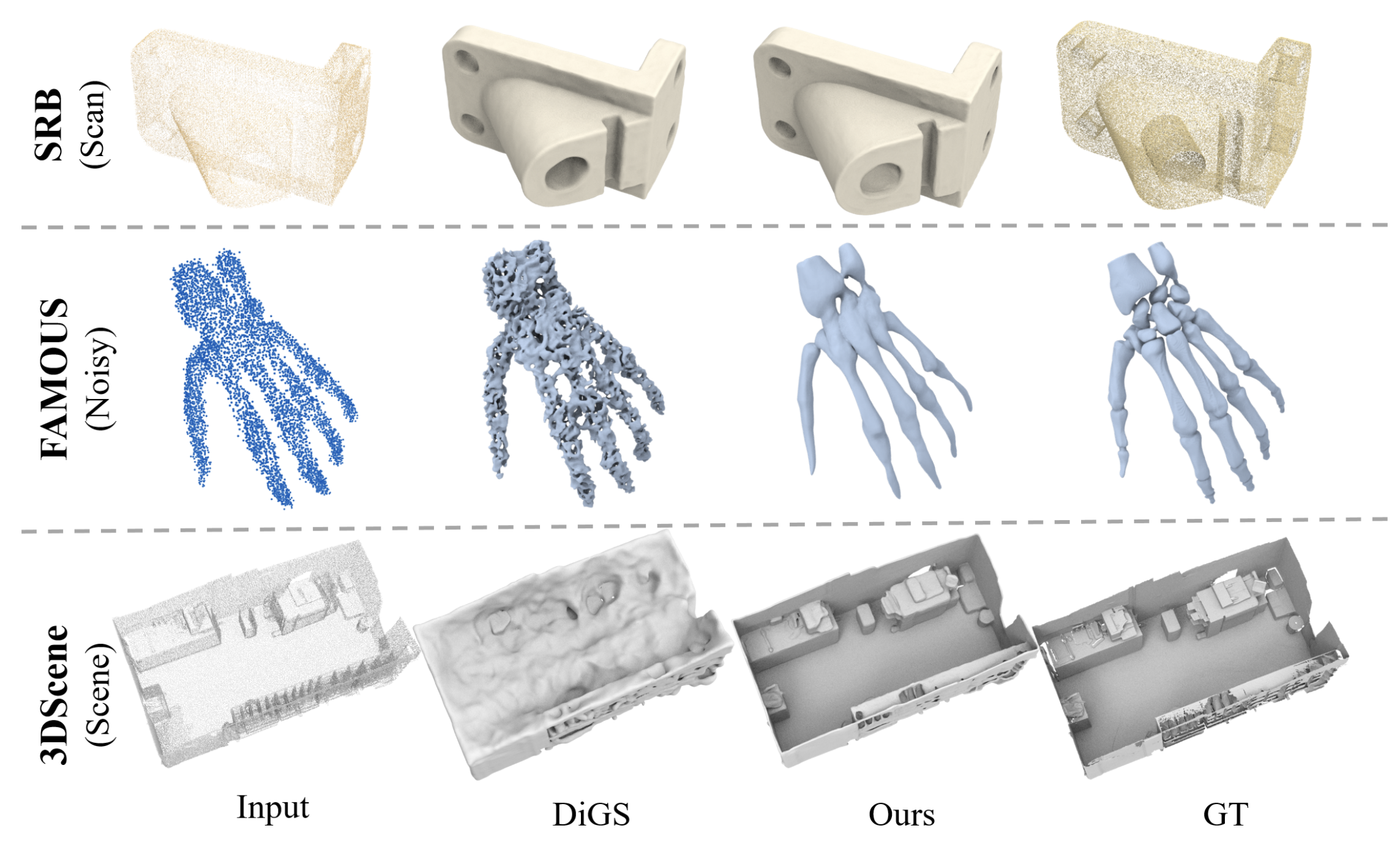
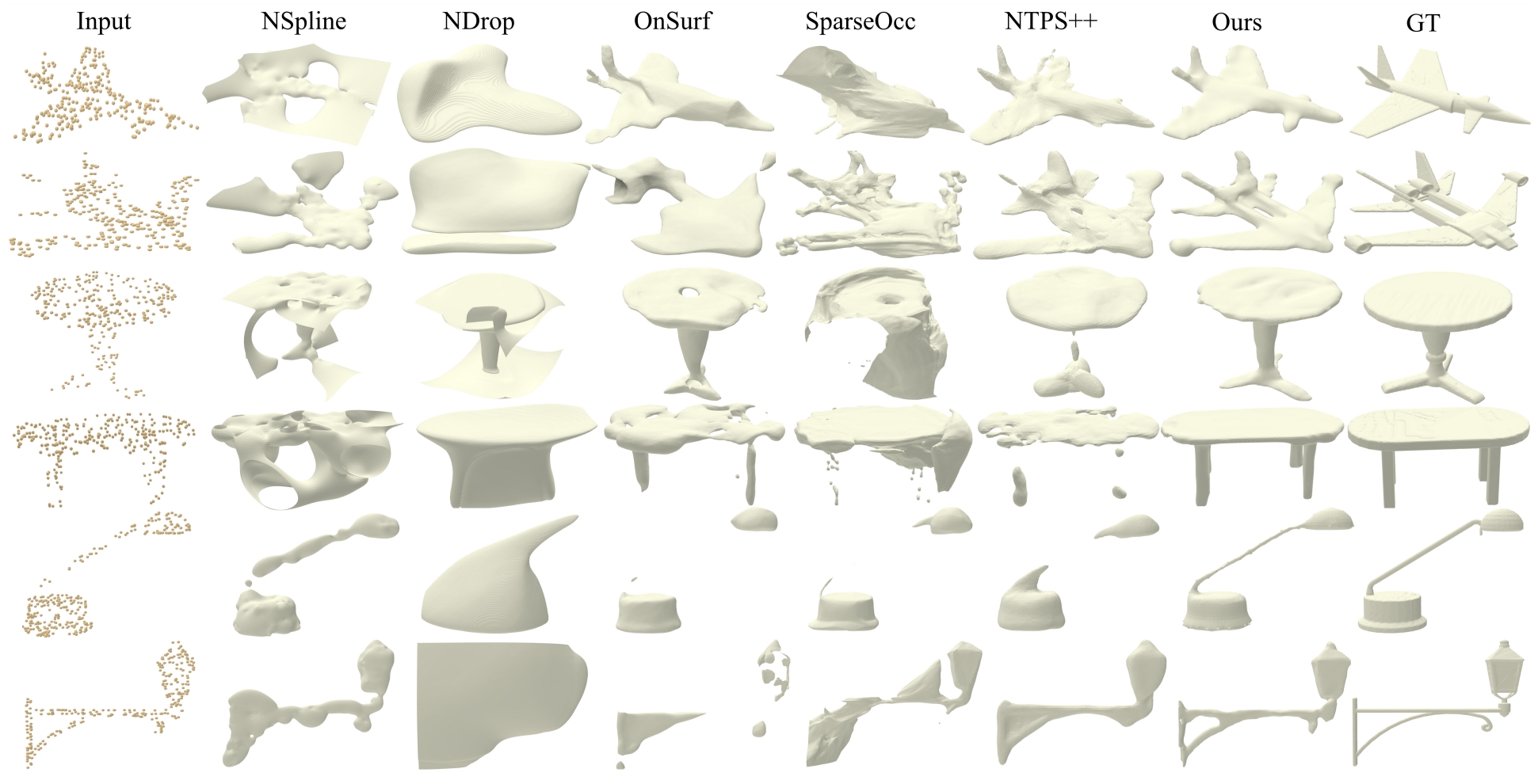
Junsheng Zhou*, Baorui Ma*, Yu-Shen Liu, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024 project page | IEEE Xplore | arXiv | code We present a fast learning framework capable of inferring signed distance functions from noisy shapes within one minute through noise-to-noise mapping. |

|
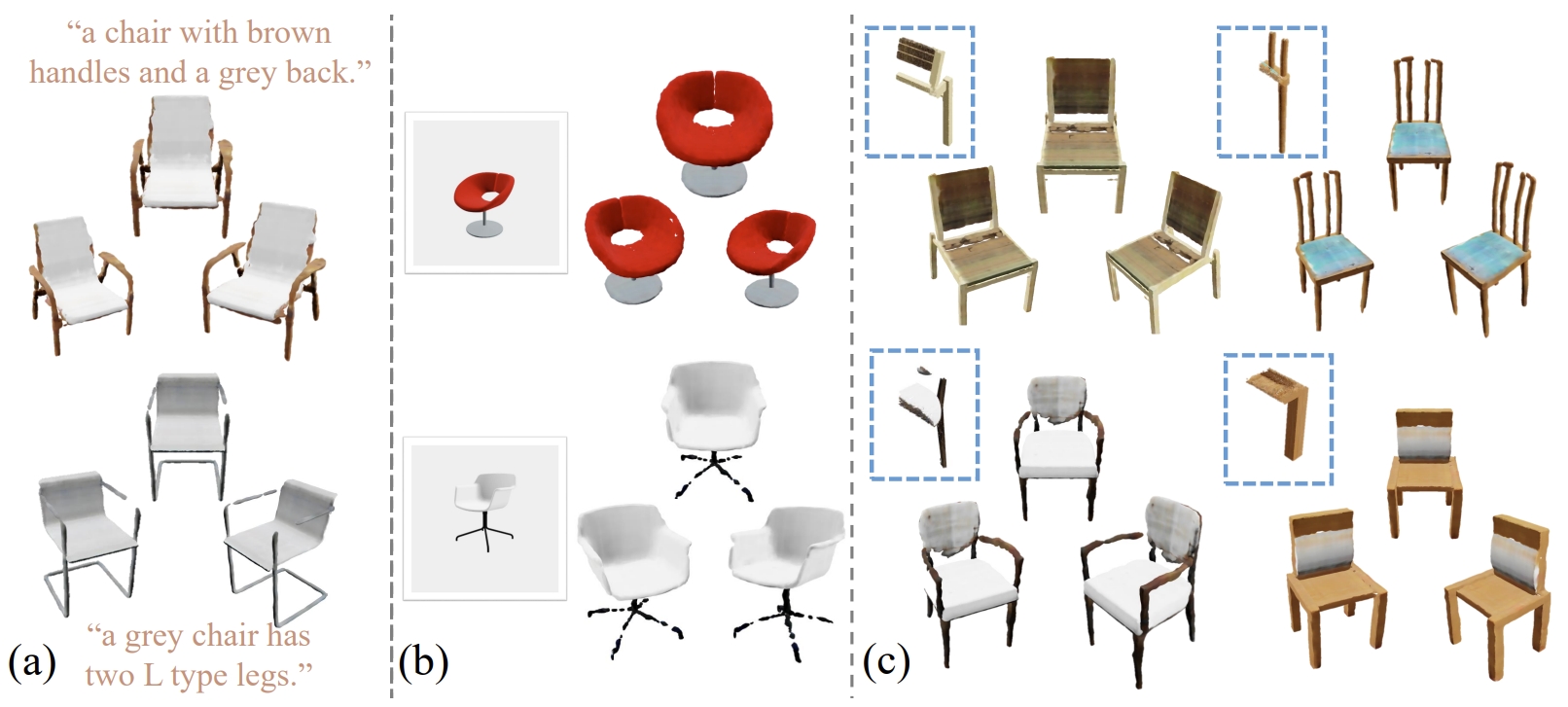
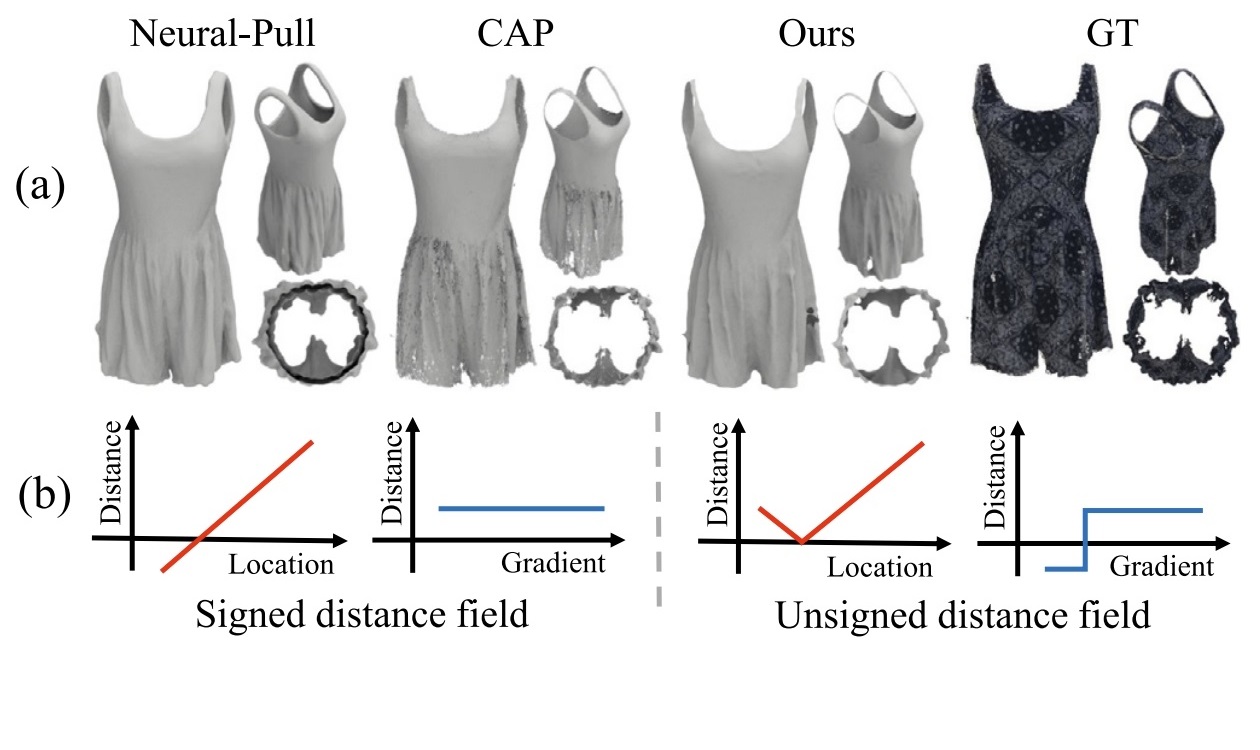
Junsheng Zhou*, Weiqi Zhang*, Baorui Ma, Kanle Shi, Yu-Shen Liu, Zhizhong Han IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 project page | arXiv | code UDiFF is a 3D diffusion model for unsigned distance fields (UDFs) which is capable to generate textured 3D shapes with open surfaces from text conditions or unconditionally. |


|
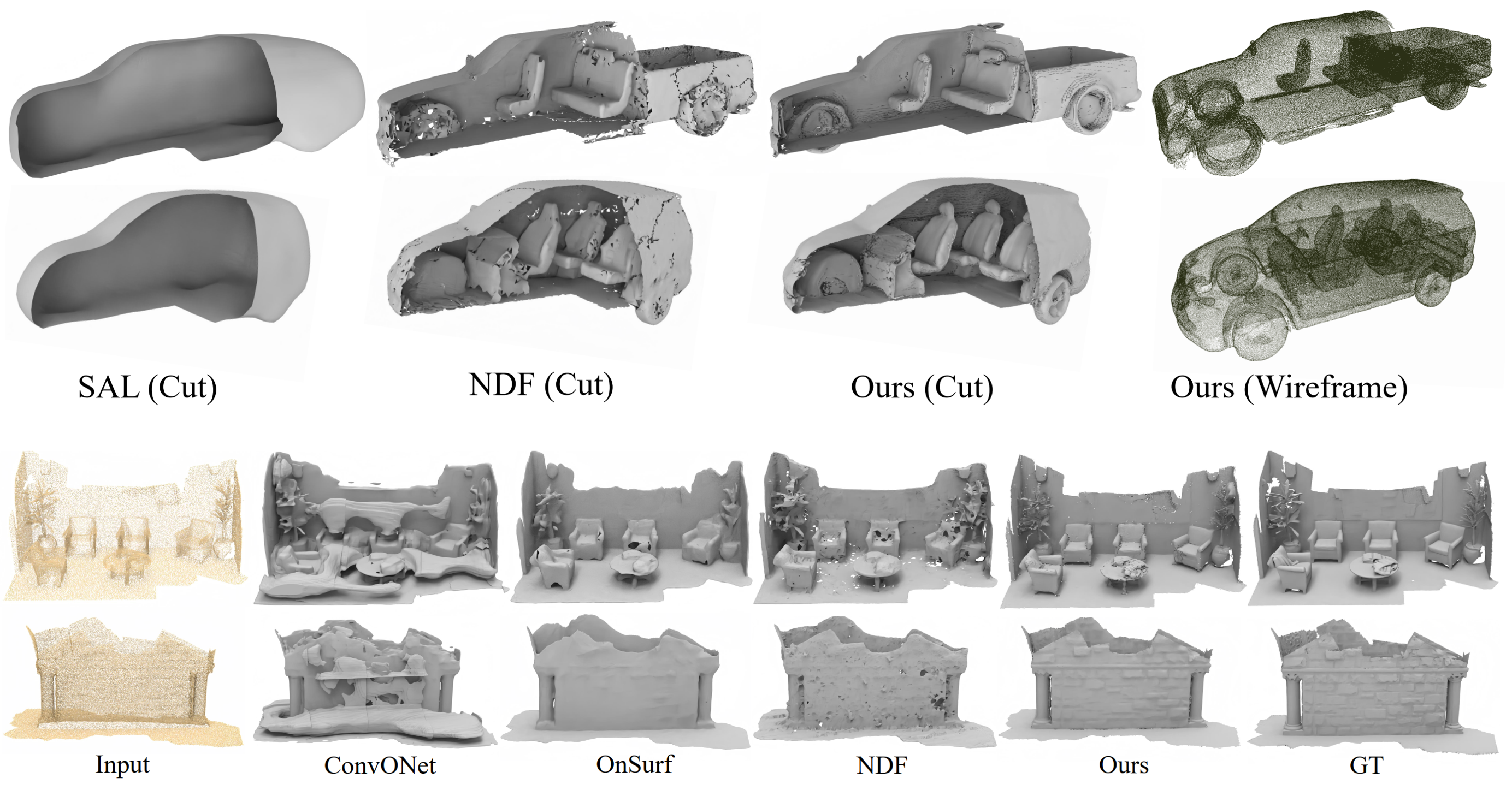
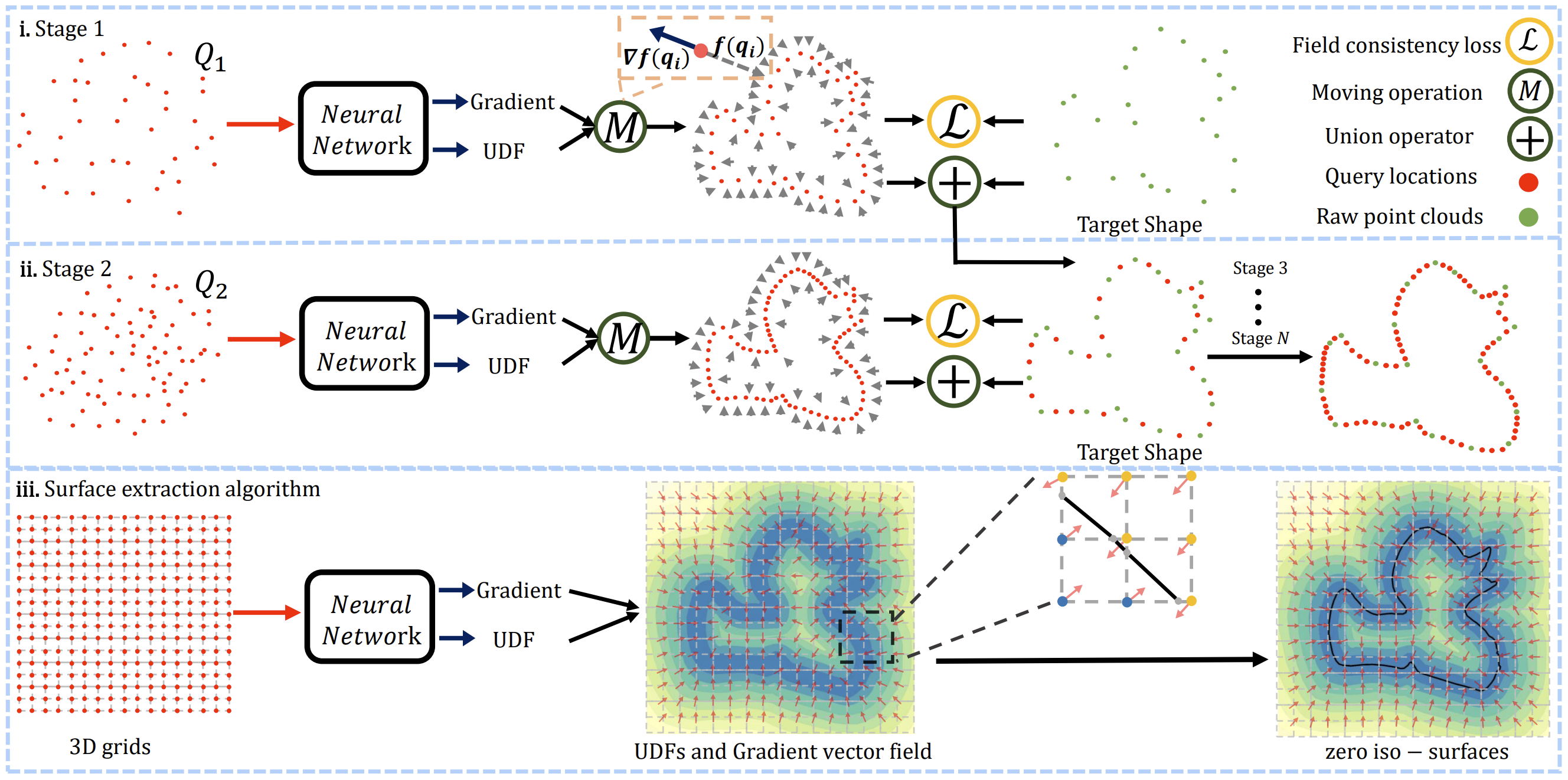
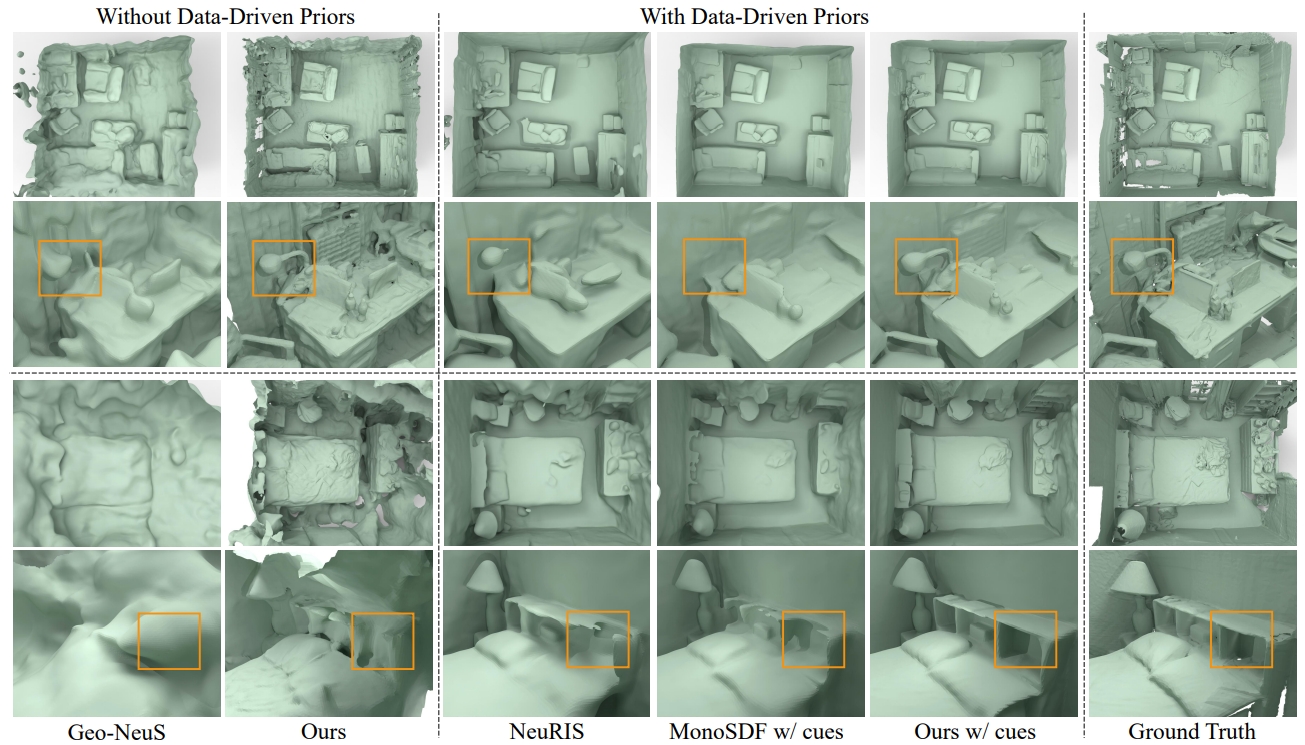
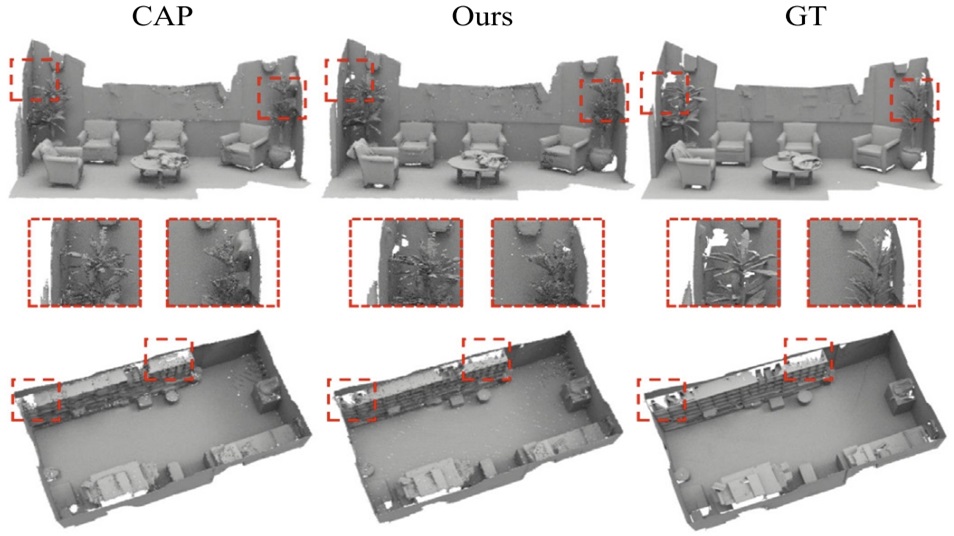
Junsheng Zhou*, Baorui Ma*, Shujuan Li, Yu-Shen Liu, Yi Fang, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024 project page | IEEE Xplore | arXiv | code We present CAP-UDF to represent shapes and scenes with arbitrary architecture by learning a Consistency-Aware unsigned distance function Progressively. |
|
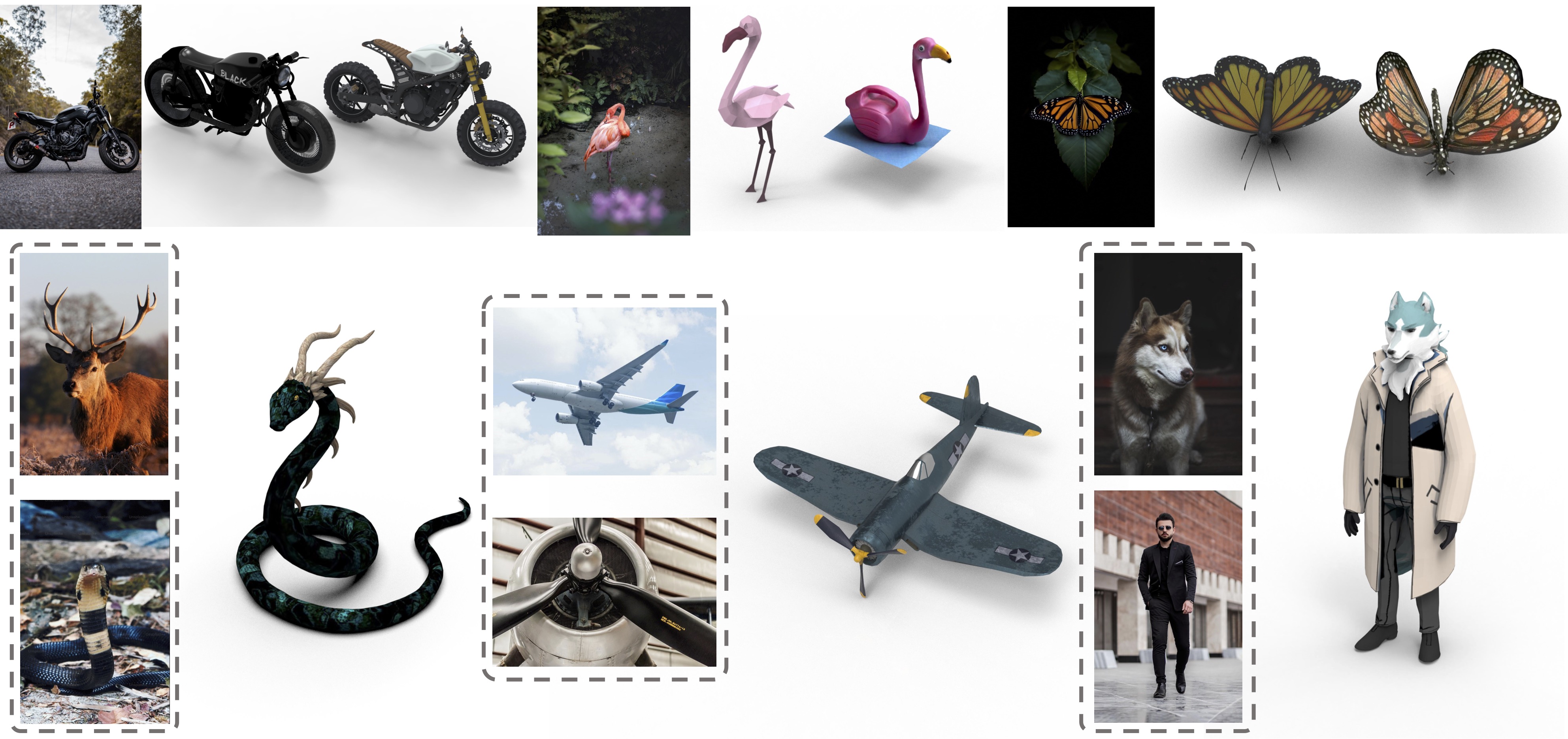
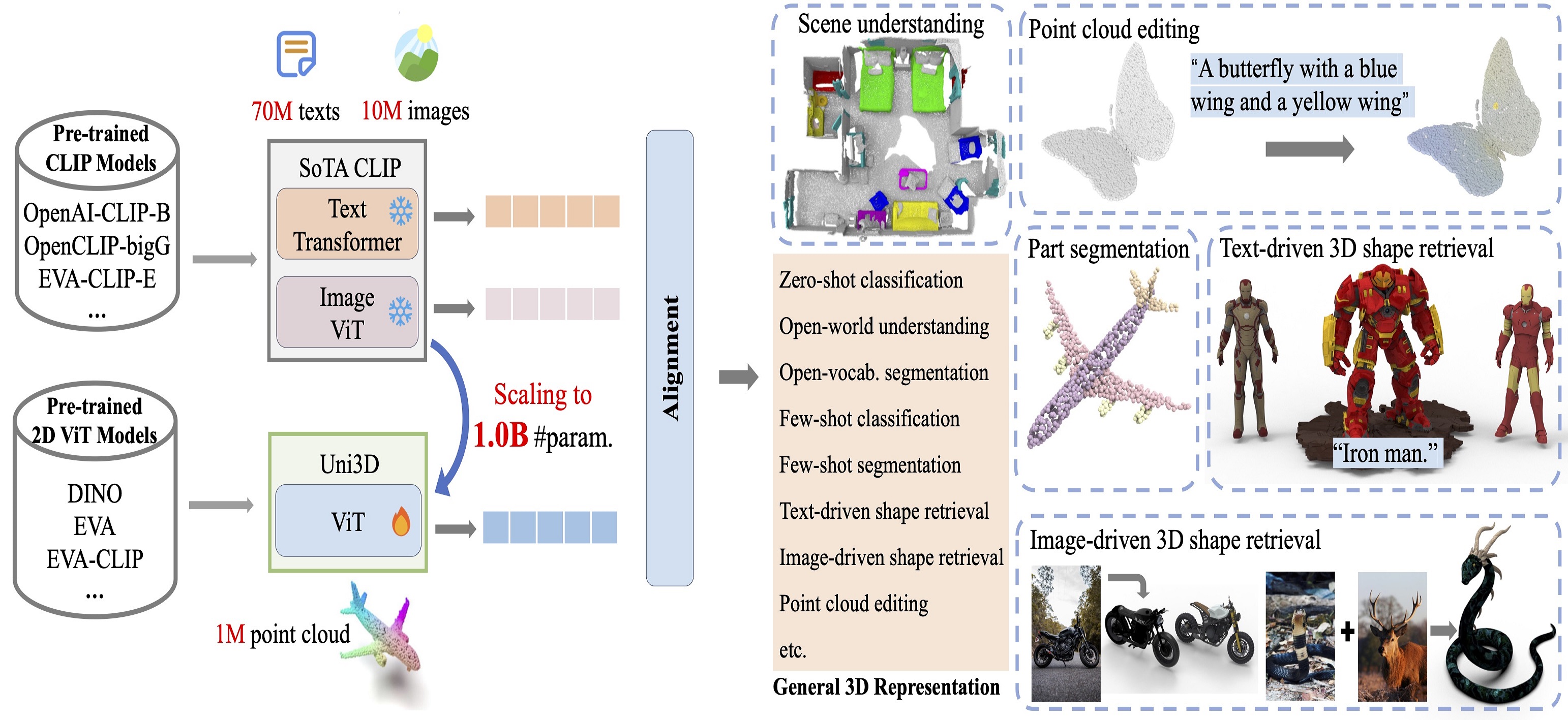
Junsheng Zhou*, Jinsheng Wang*, Baorui Ma*, Yu-Shen Liu, Tiejun Huang, Xinlong Wang International Conference on Learning Representations (ICLR), 2024 (Spotlight) Model Zoo | arXiv | code We present Uni3D, a unified and scalable 3D pretraining framework for large-scale 3D representation learning, and explore its limits at the scale of one billion parameters. |
|
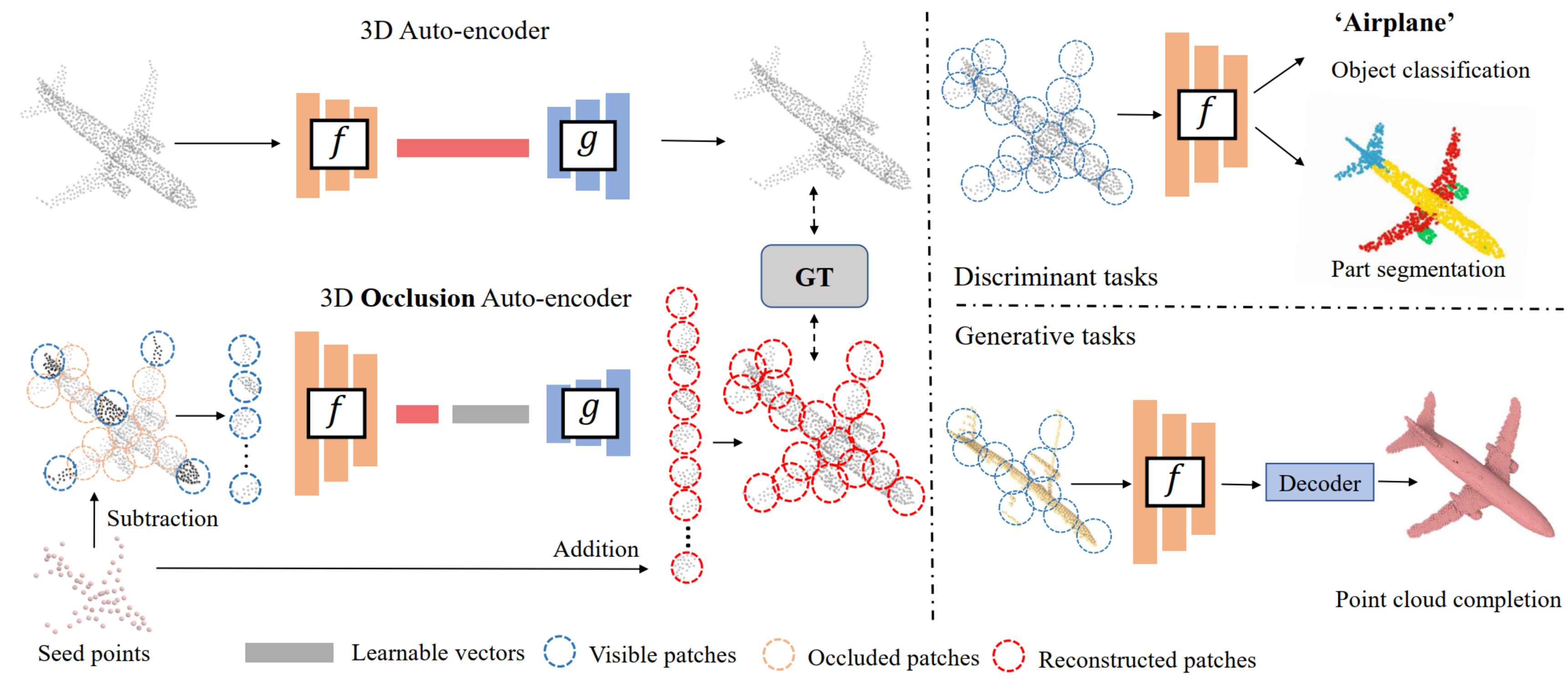
Junsheng Zhou*, Xin Wen*, Baorui Ma, Yu-Shen Liu, Yue Gao, Yi Fang, Zhizhong Han IEEE International Conference on Robotics and Automation (ICRA), 2024 (Oral) project page | arXiv | code We present 3D-OAE, a novel self-supervised point cloud representation learning framework which is highly efficient and can be further transferred to various downstream tasks. |
|
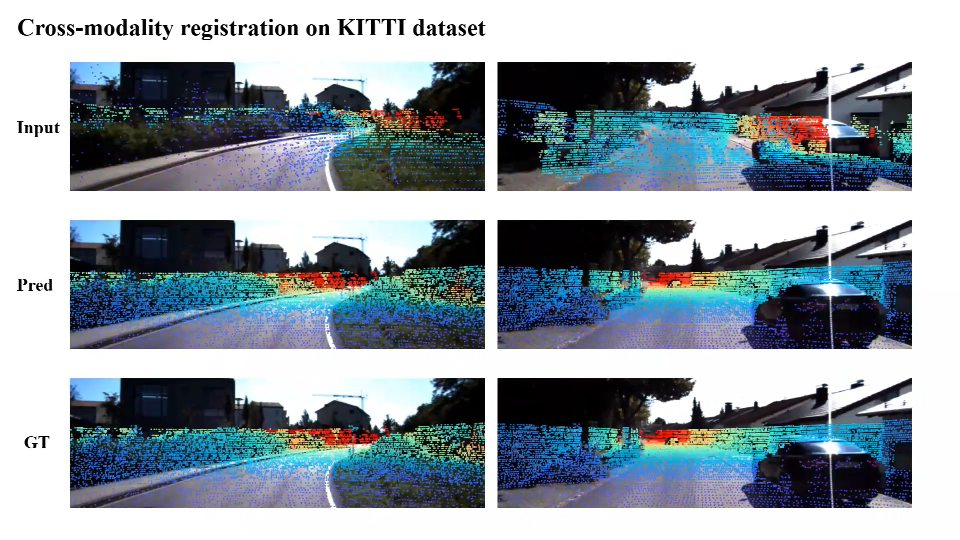
Junsheng Zhou*, Baorui Ma*, Wenyuan Zhang, Yi Fang, Yu-Shen Liu, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2023 (Spotlight) project page | arXiv | code We design a triplet network to learn VoxelPoint-to-Pixel matching via a differentiable probabilistic PnP solver. |
|
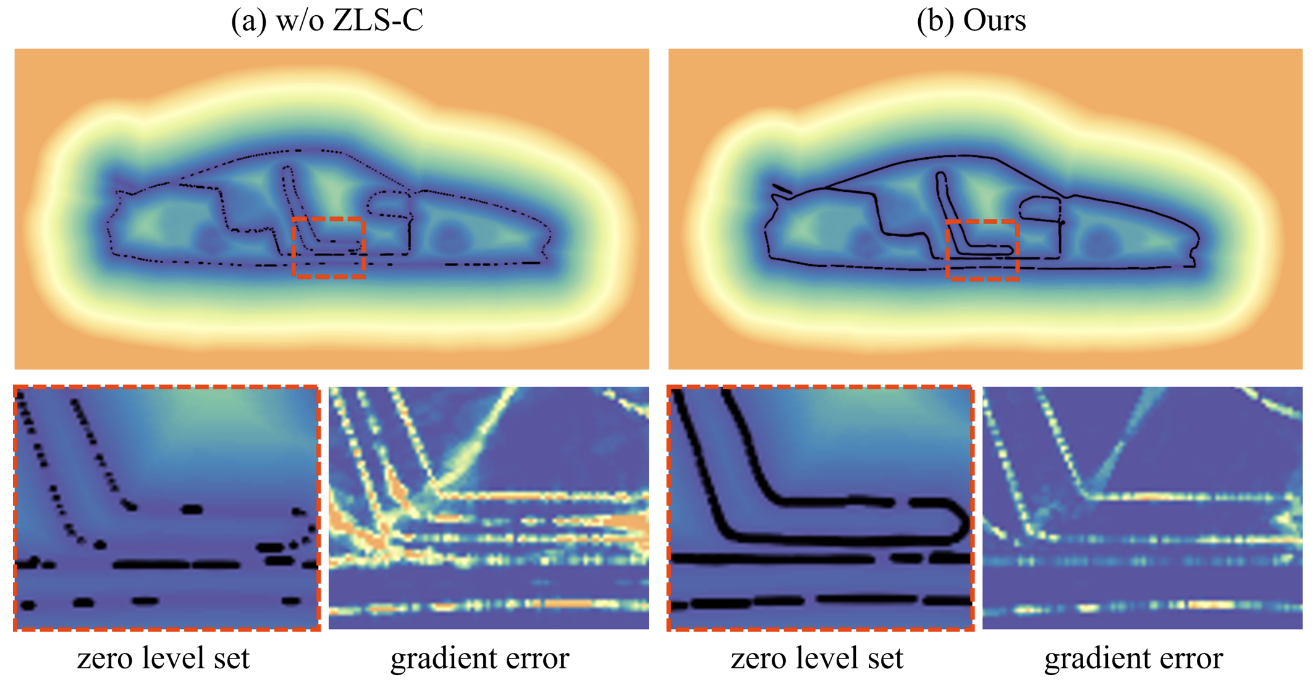
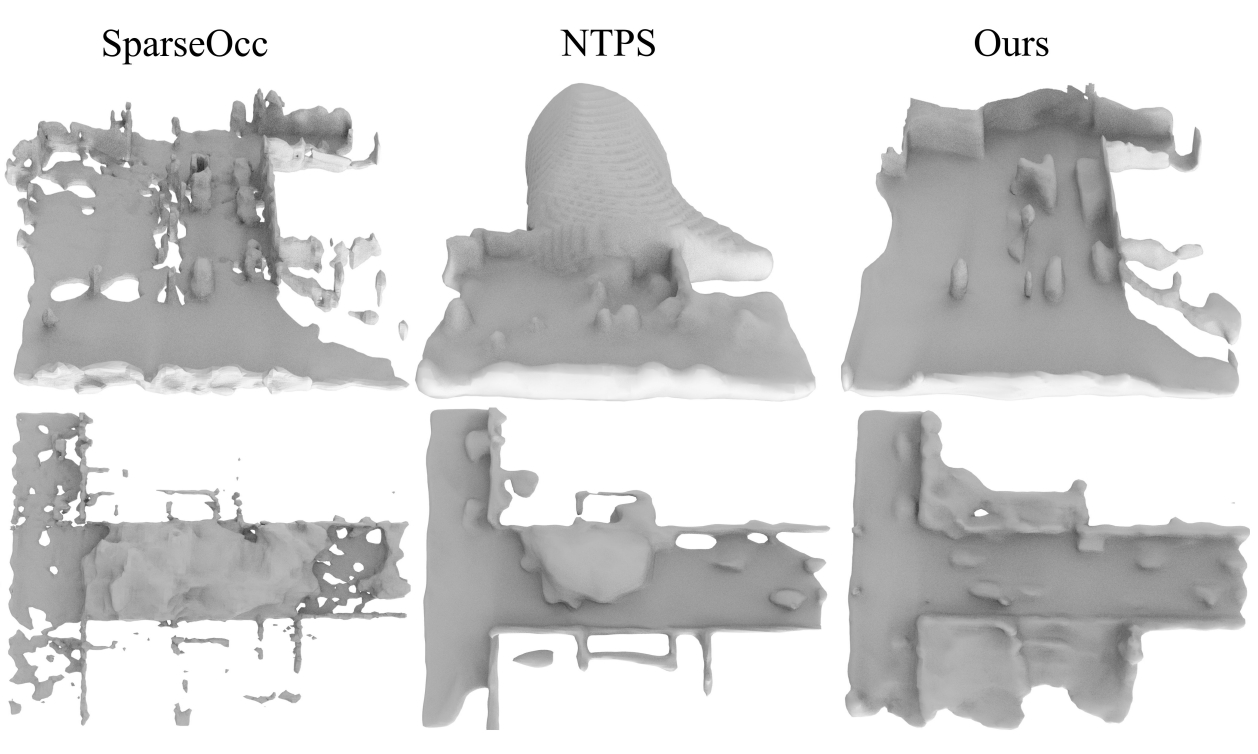
Junsheng Zhou*, Baorui Ma*, Shujuan Li, Yu-Shen Liu, Zhizhong Han IEEE/CVF International Conference on Computer Vision (ICCV), 2023 project page | arXiv | code We propose to guide the learning of zero level set in UDF using the rest non-zero level sets via a projection procedure. |
|
Junsheng Zhou*, Baorui Ma*, Yu-Shen Liu, Yi Fang, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2022 project page | arXiv | code We present CAP-UDF to represent shapes and scenes with arbitrary architecture by learning a Consistency-Aware unsigned distance function Progressively. |
|
|
|
template adapted from this awesome website
|