|
I am currently a Ph.D. student in School of Software, Tsinghua University, advised by Prof. Yu-Shen Liu. My research interests lie in the area of 3D computer vision and graphics, especially in 3D foundation models, generative models, and spatial intelligence. My research is supported by Baidu Scholarship (10 candidates worldwide each year) and NSFC Doctoral Program. Goal: Empowering AGI with spatial and physical intelligence. |

|
|
|
|


|
Junsheng Zhou*, Weiqi Zhang*, Baorui Ma, Kanle Shi, Yu-Shen Liu, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2026 project page | arXiv | code A unified framework providing large-scale datasets, benchmarks, and generative models for UDF-based 3D shape representation and generation. |
|
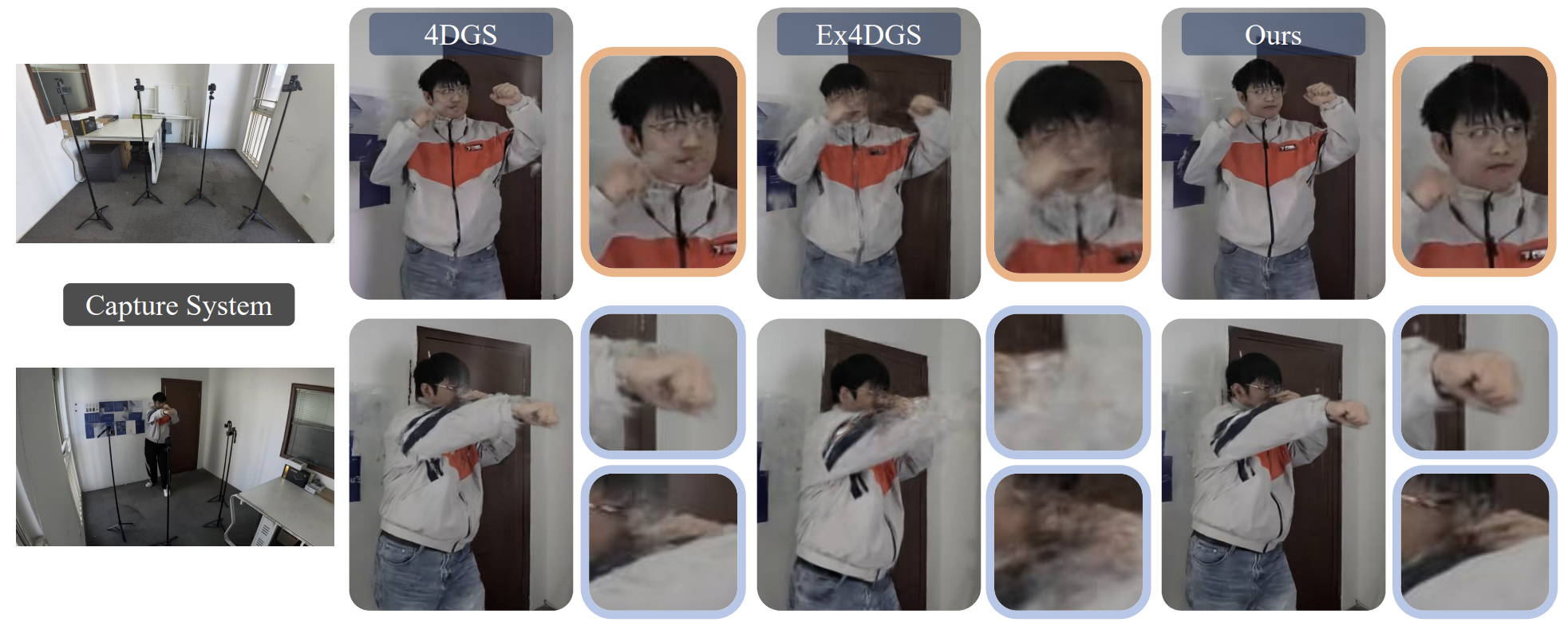
Junsheng Zhou*, Zhifan Yang*, Liang Han, Wenyuan Zhang, Kanle Shi, Shenkun Xu, Yu-Shen Liu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 project page | arXiv | code A 4D Gaussian Splatting framework using a 4-camera rig for high-fidelity dynamic scene reconstruction and rendering. |


|
Weiqi Zhang*, Junsheng Zhou†* (Corresponding Author), Haotian Geng, Kanle Shi, Shenkun Xu, Yi Fang, Yu-Shen Liu† IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 project page | arXiv | code A geometry-aware framework that grows 3D Gaussians from point clouds with text guidance for controllable 3D generation. |
|
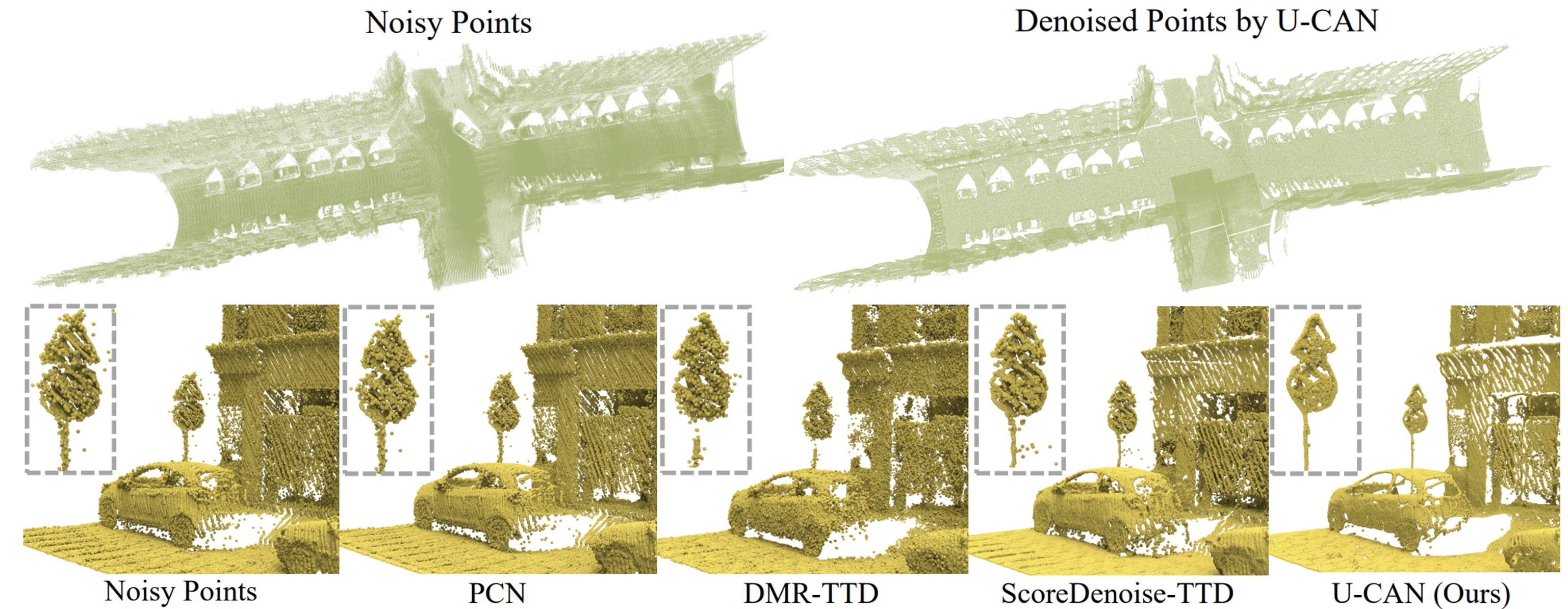
Junsheng Zhou*, Xingyu Shi*, Haichuan Song, Yi Fang, Yu-Shen Liu, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2025 project page | arXiv | code Unsupervised point cloud denoising via consistency-aware Noise2Noise matching, requiring no clean point cloud supervision. |

|
Weiqi Zhang*, Junsheng Zhou†* (Corresponding Author), Haotian Geng, Wenyuan Zhang, Yu-Shen Liu† IEEE/CVF International Conference on Computer Vision (ICCV), 2025 project page | arXiv | code GAP Gaussianizes arbitrary point clouds with text guidance, fitting high-quality 3D Gaussian representations from raw inputs. |
|
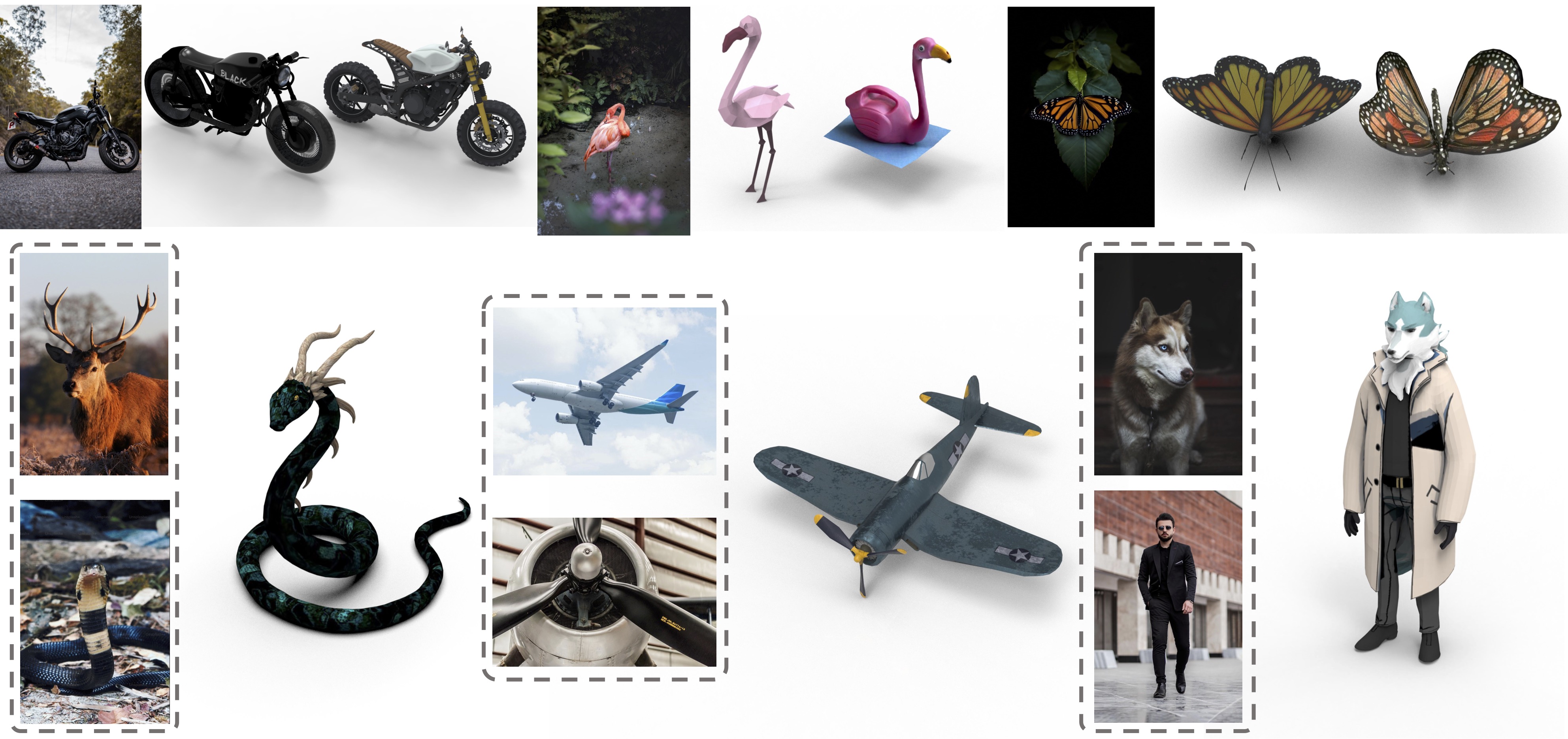
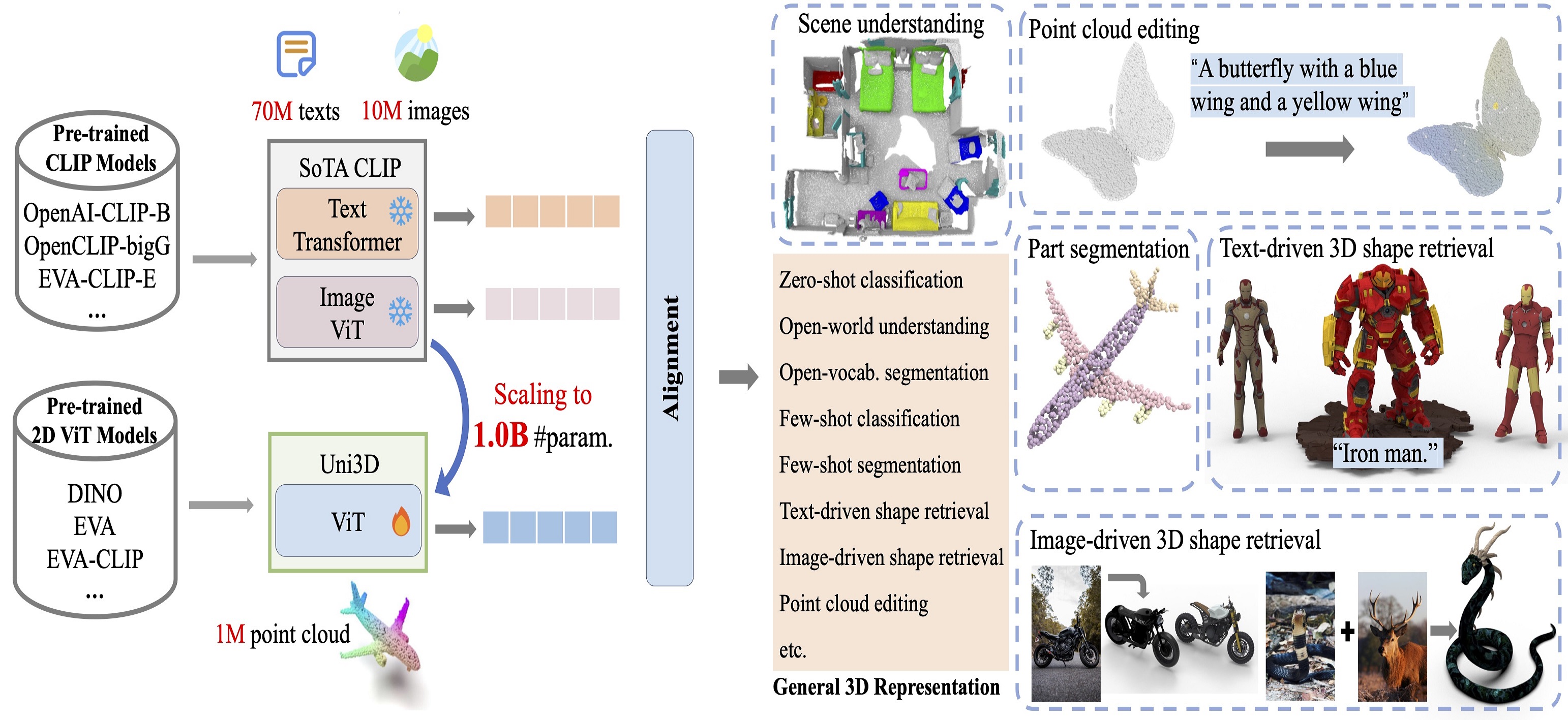
Junsheng Zhou*, Jinsheng Wang*, Baorui Ma*, Yu-Shen Liu, Tiejun Huang, Xinlong Wang International Conference on Learning Representations (ICLR), 2024 (Spotlight) Model Zoo | arXiv | code We present Uni3D, a unified and scalable 3D pretraining framework for large-scale 3D representation learning, and explore its limits at the scale of one billion parameters. |
|
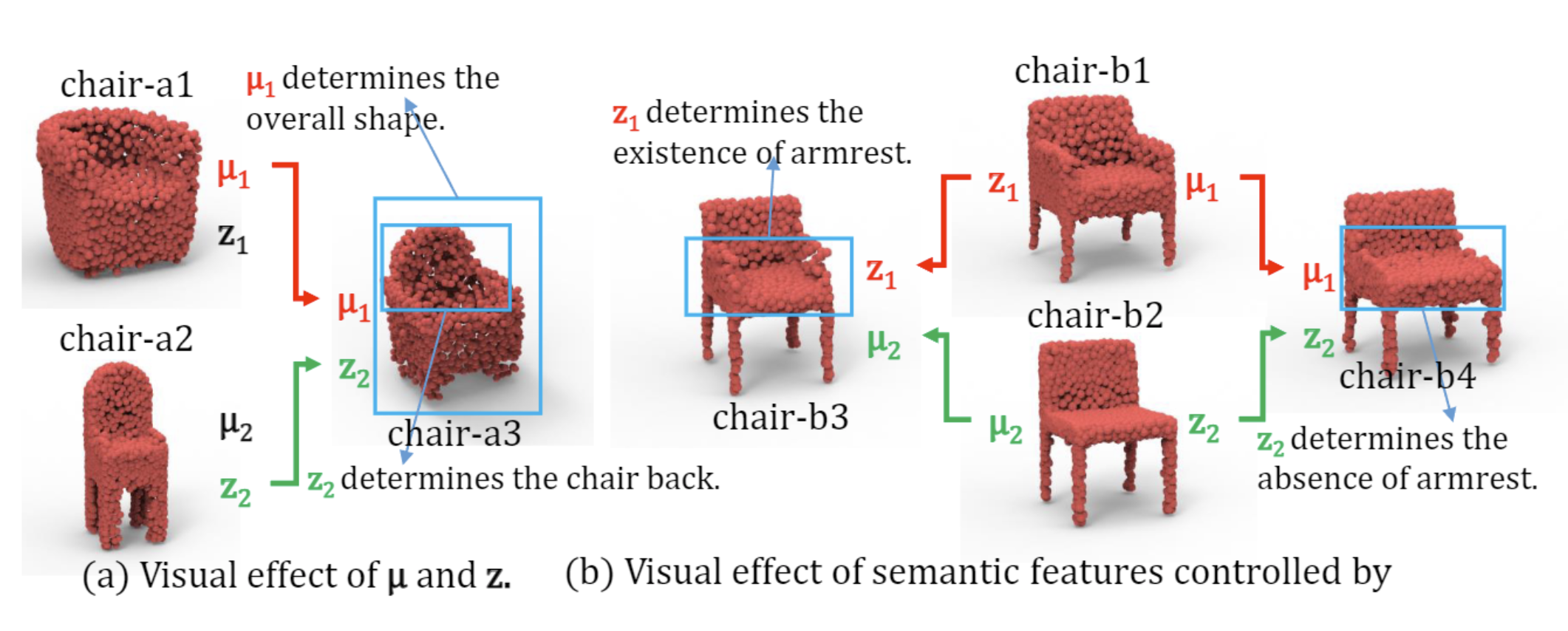
Junsheng Zhou*, Weiqi Zhang*, Yu-Shen Liu Conference on Neural Information Processing Systems (NeurIPS), 2024 project page | arXiv | code Introducing a powerful 3D generative model that generates Gaussian primitives in arbitrary numbers by functionally disentangling Gaussian Splatting. |
|
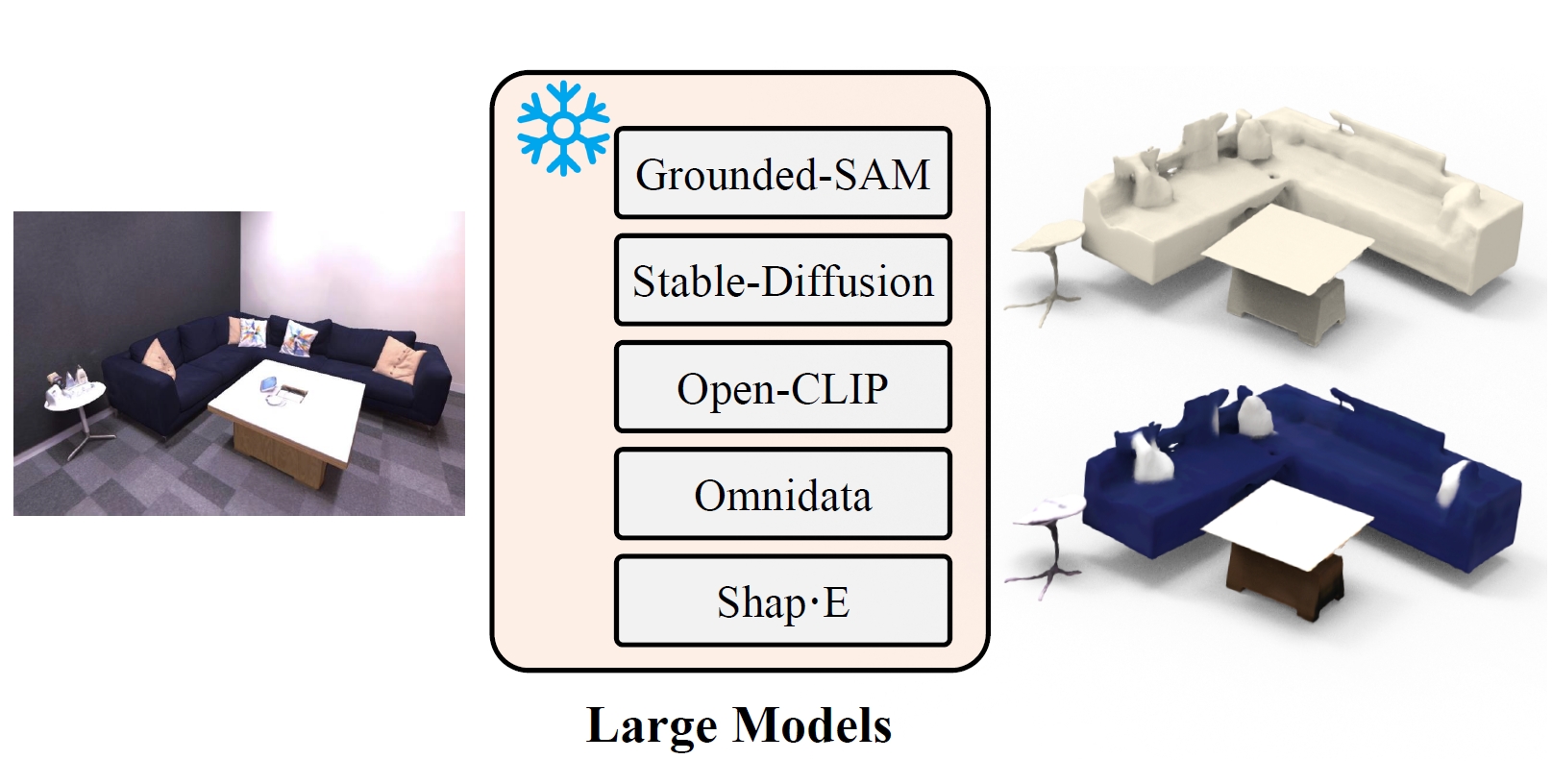
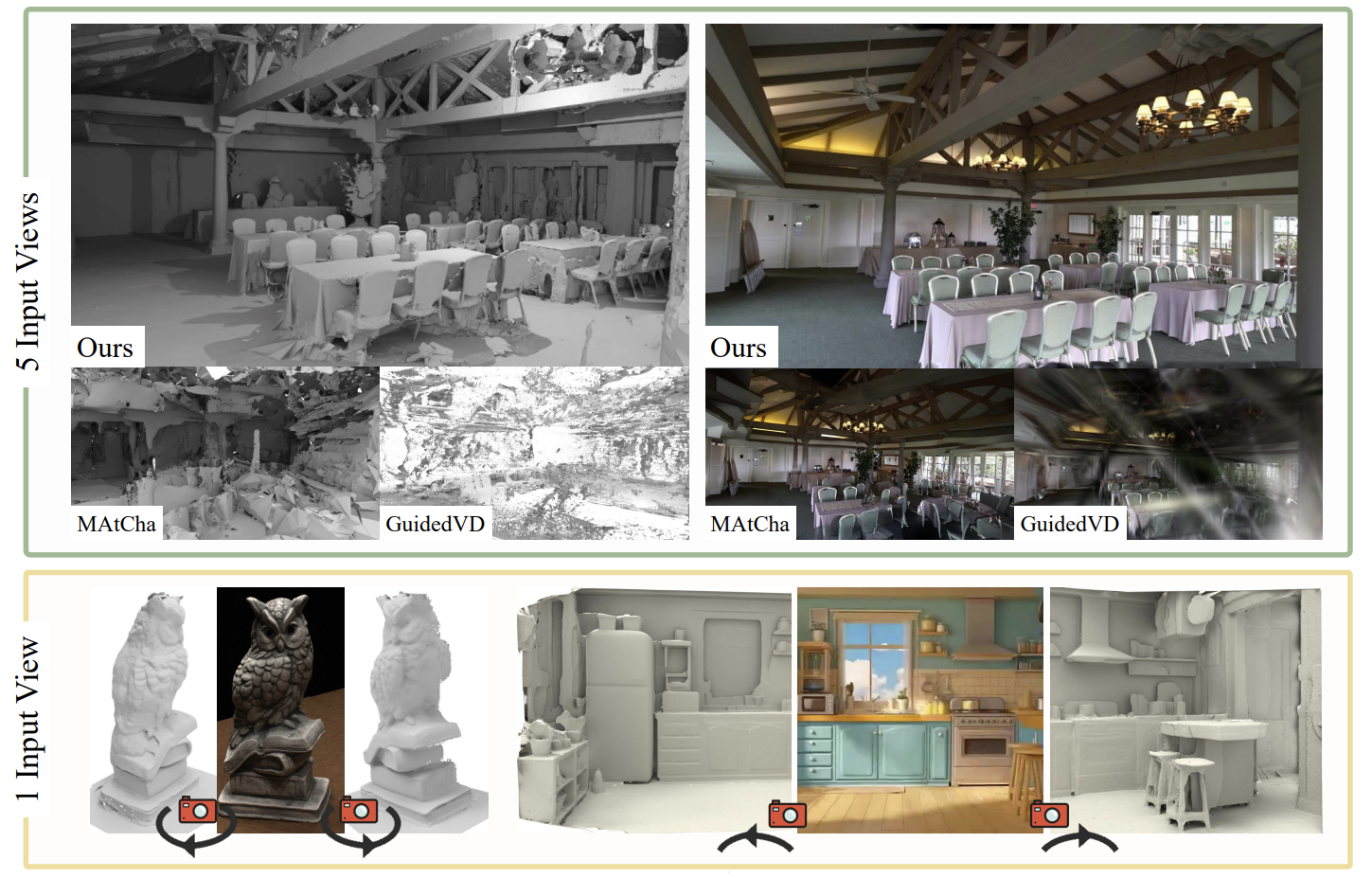
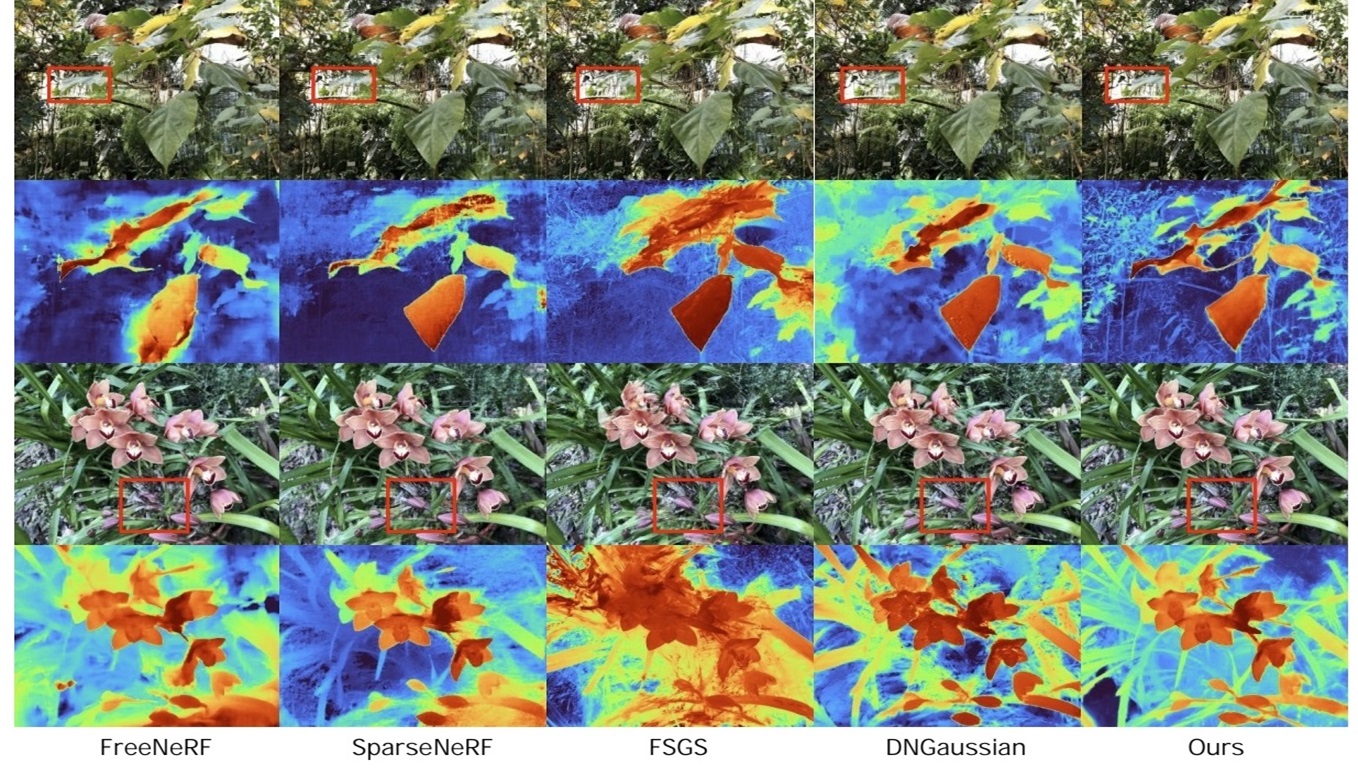
Junsheng Zhou, Yu-Shen Liu, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2024 project page | arXiv | code We propose to assemble diverse deep priors from large models for scene generation from single images in a zero shot manner. |
|
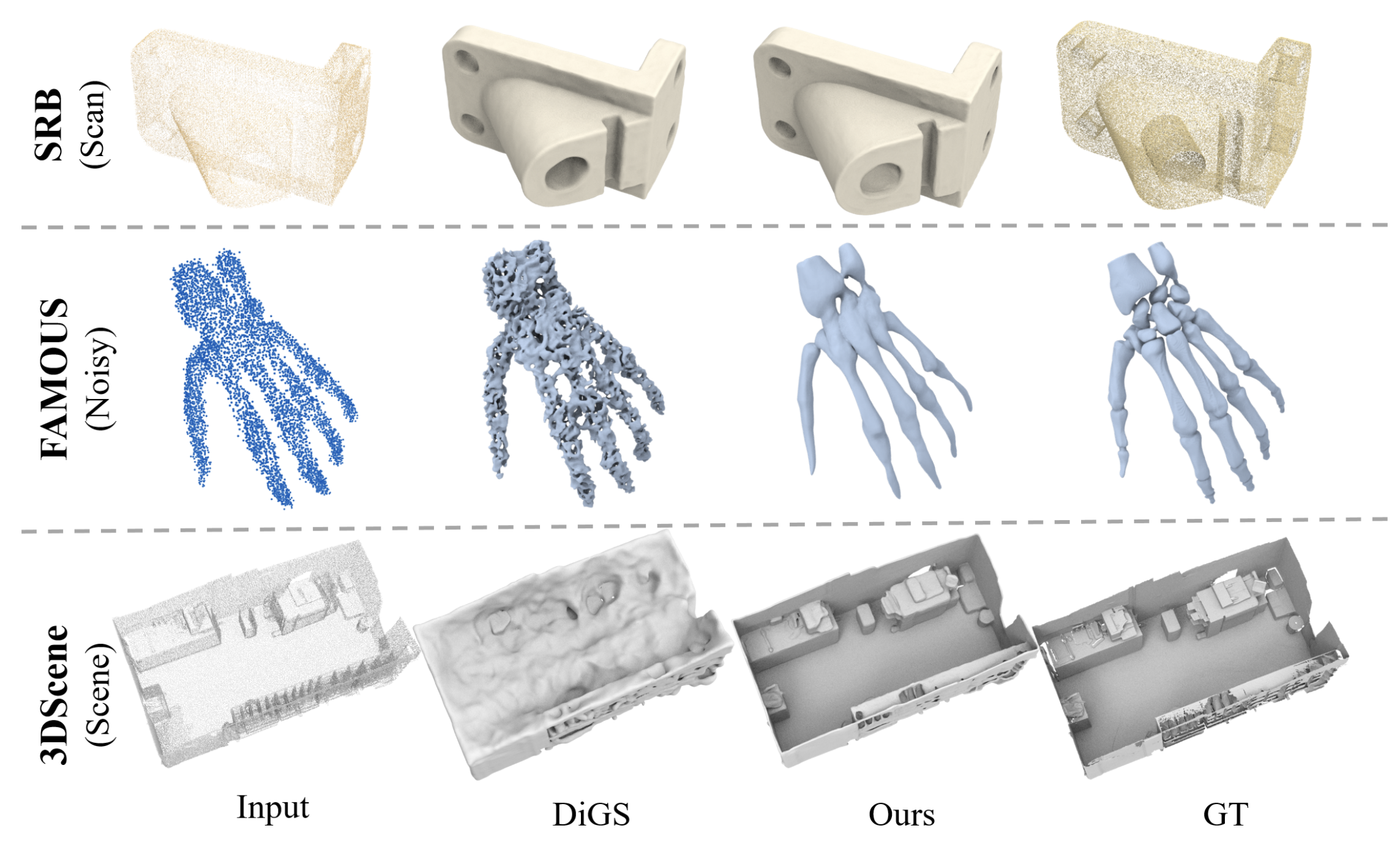
Junsheng Zhou*, Baorui Ma*, Yu-Shen Liu, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024 project page | IEEE Xplore | arXiv | code We present a fast learning framework capable of inferring signed distance functions from noisy shapes within one minute through noise-to-noise mapping. |

|
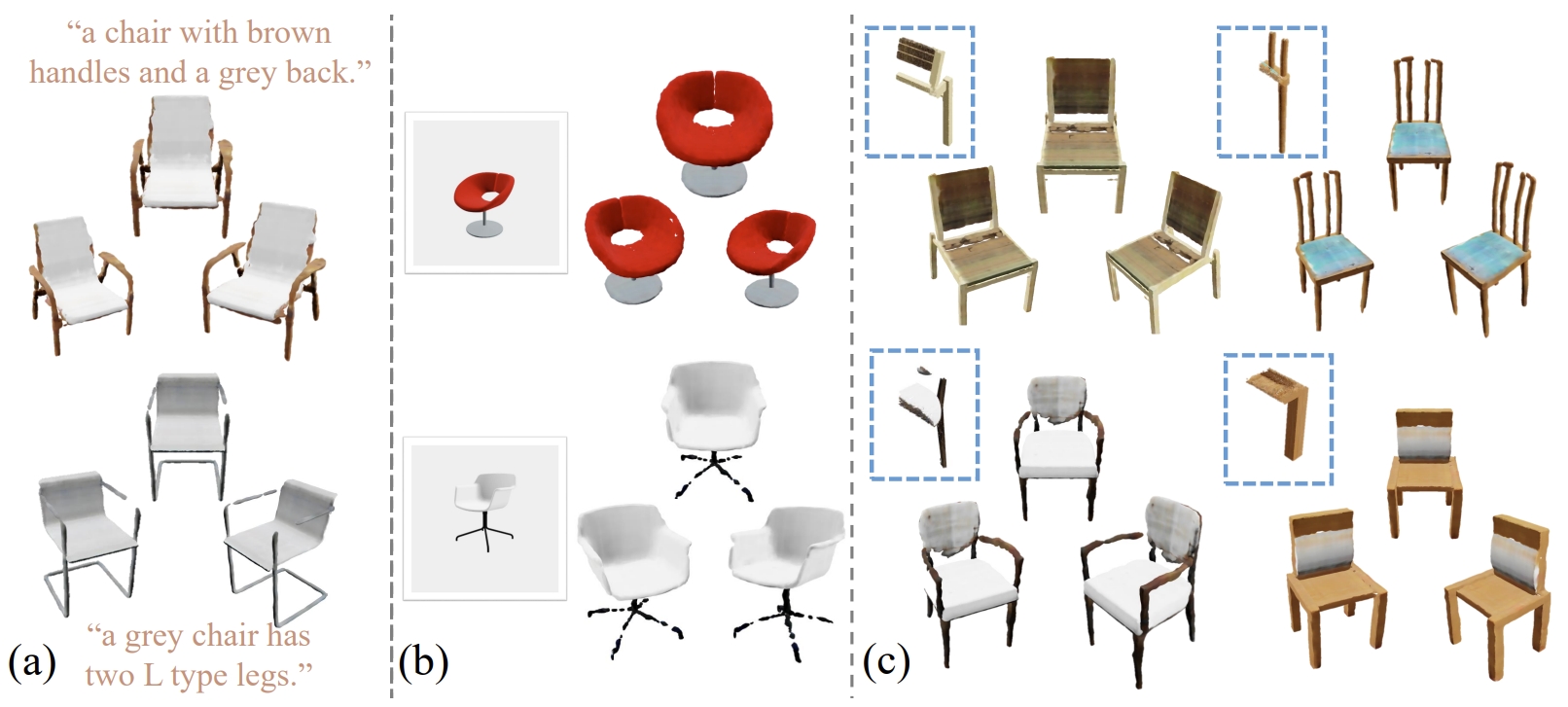
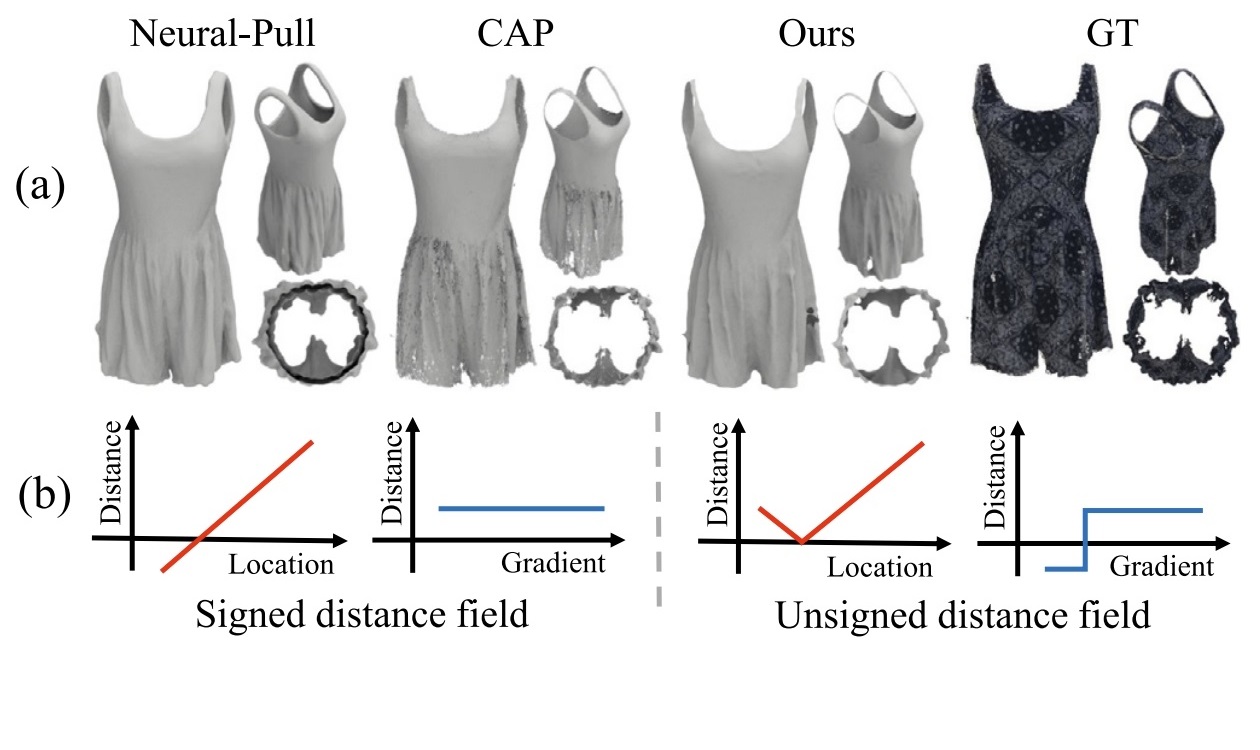
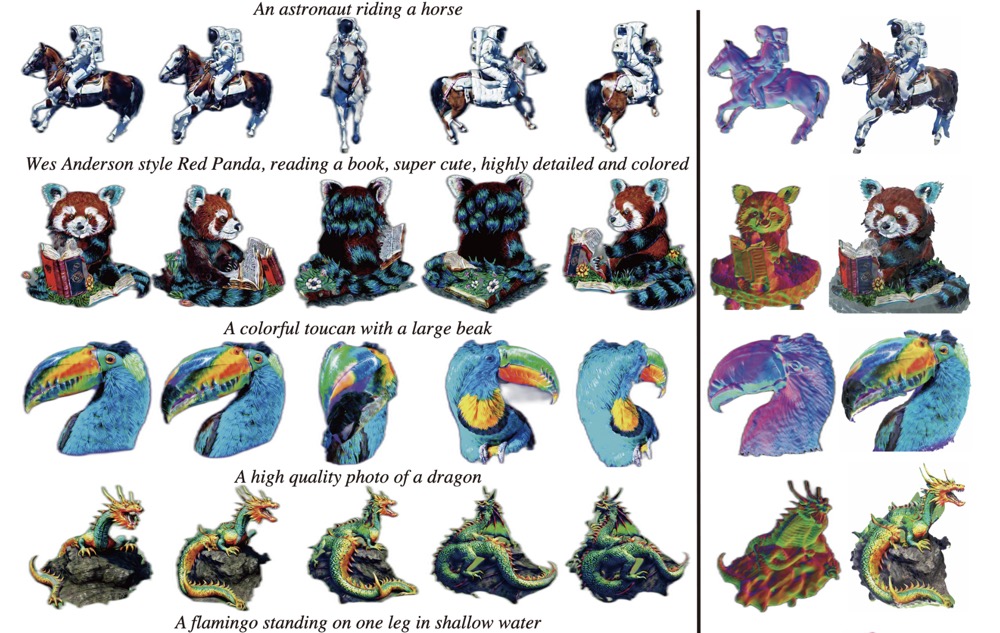
Junsheng Zhou*, Weiqi Zhang*, Baorui Ma, Kanle Shi, Yu-Shen Liu, Zhizhong Han IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 project page | arXiv | code UDiFF is a 3D diffusion model for unsigned distance fields (UDFs) which is capable to generate textured 3D shapes with open surfaces from text conditions or unconditionally. |


|
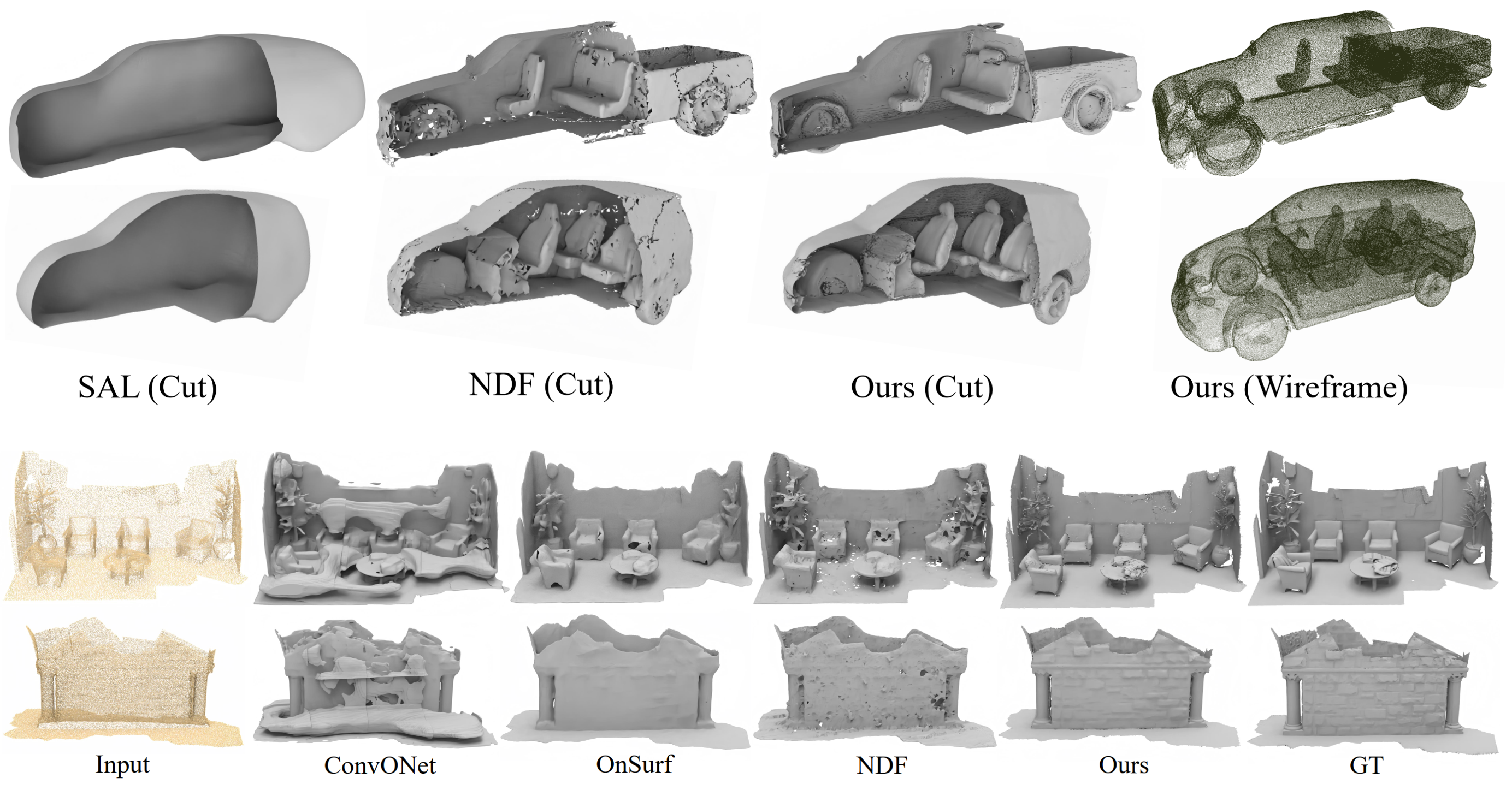
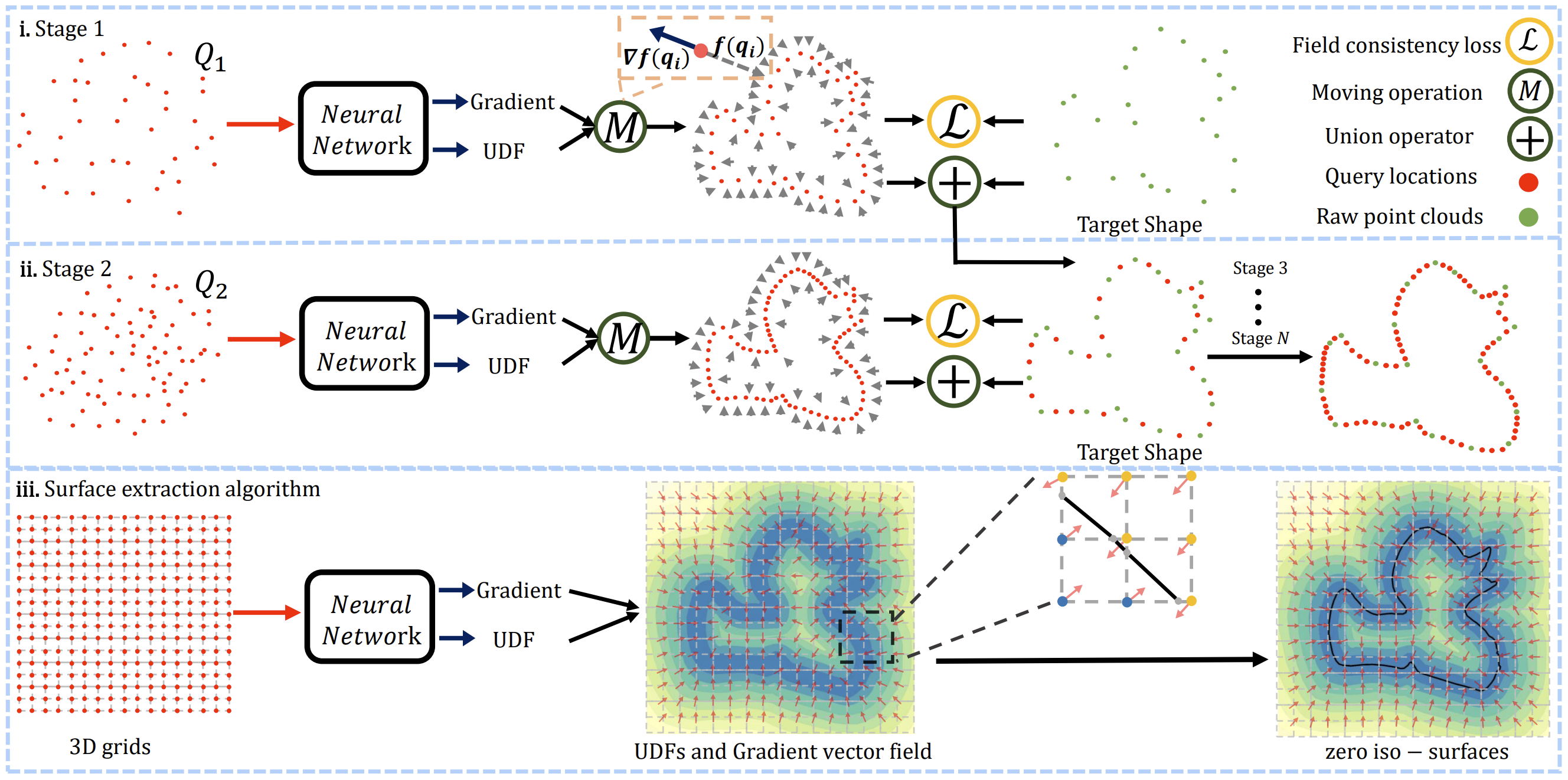
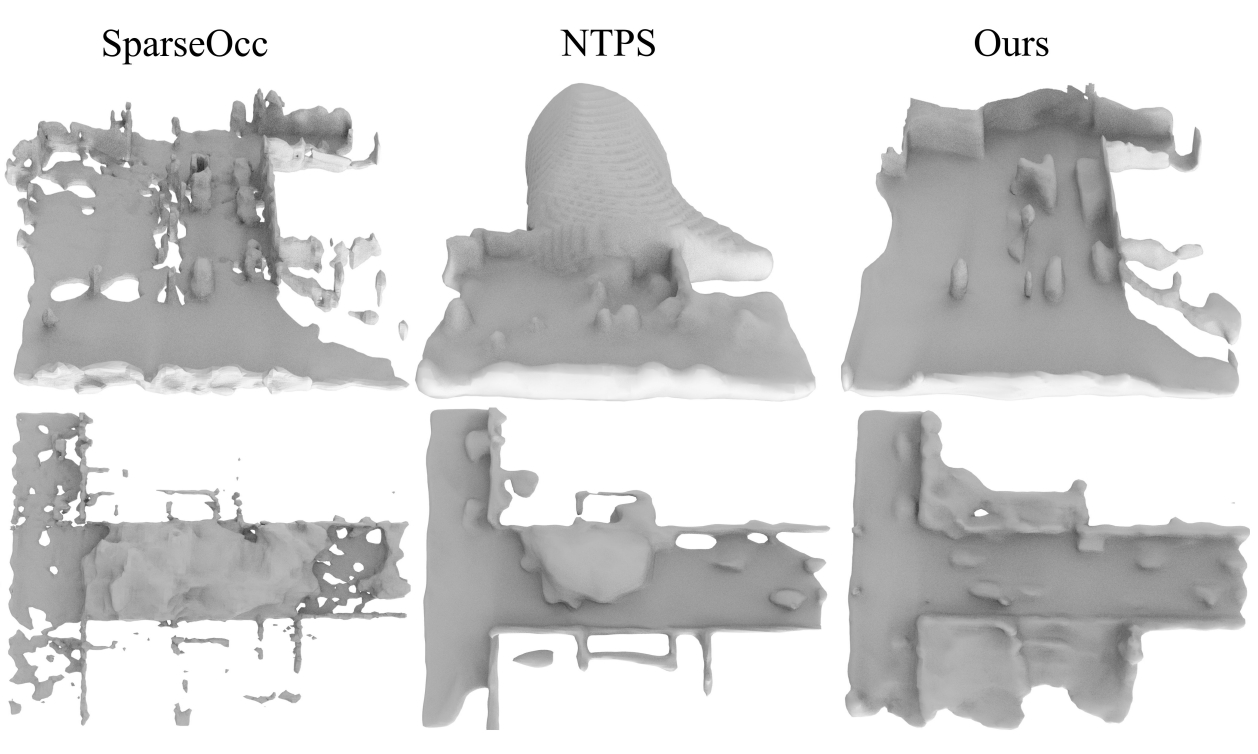
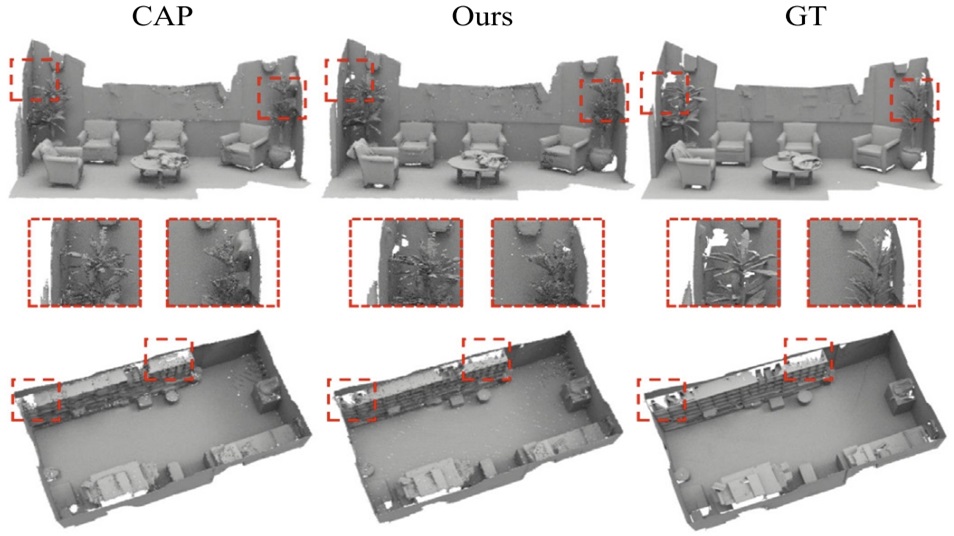
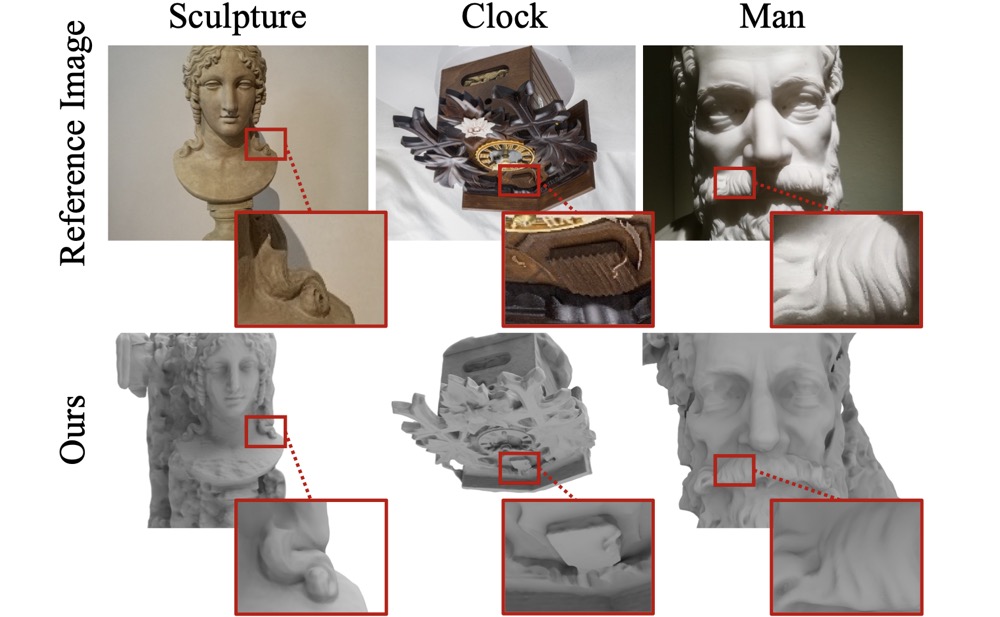
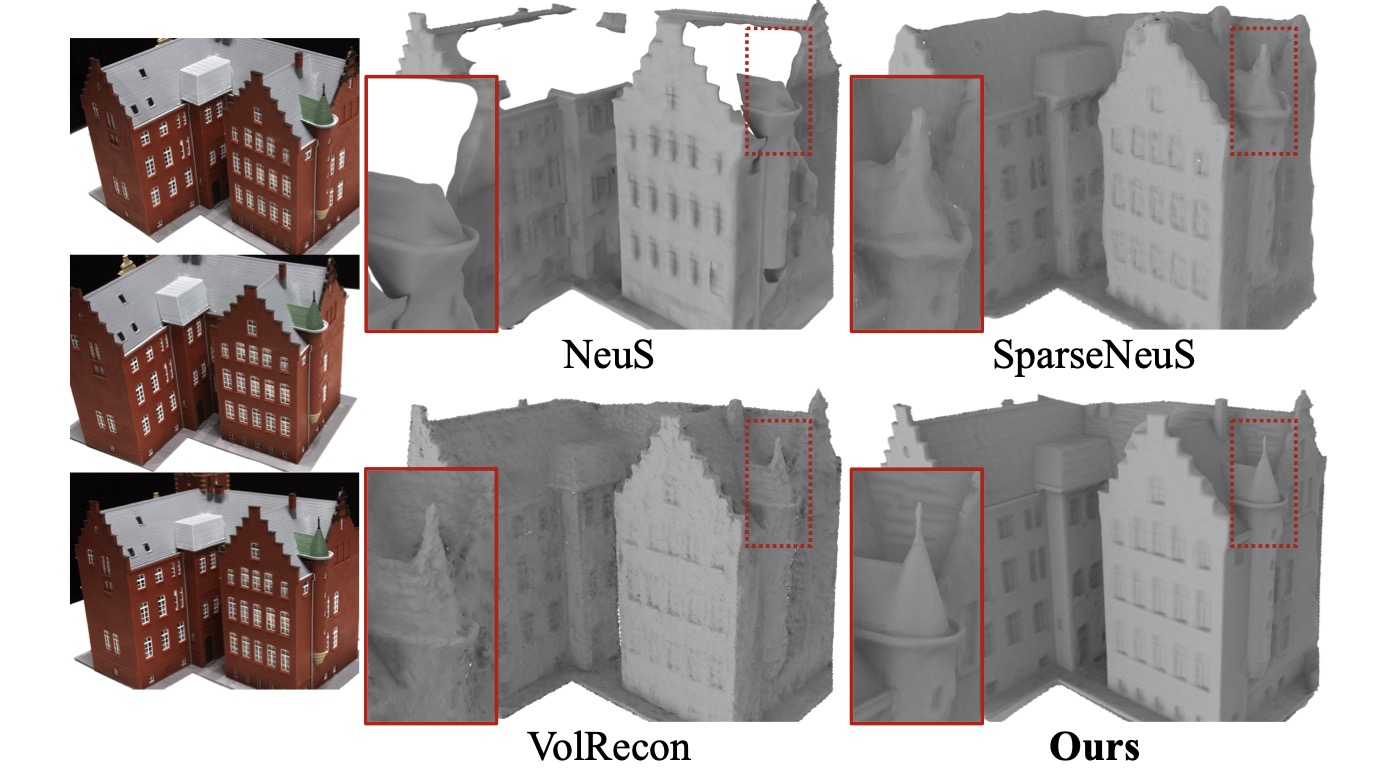
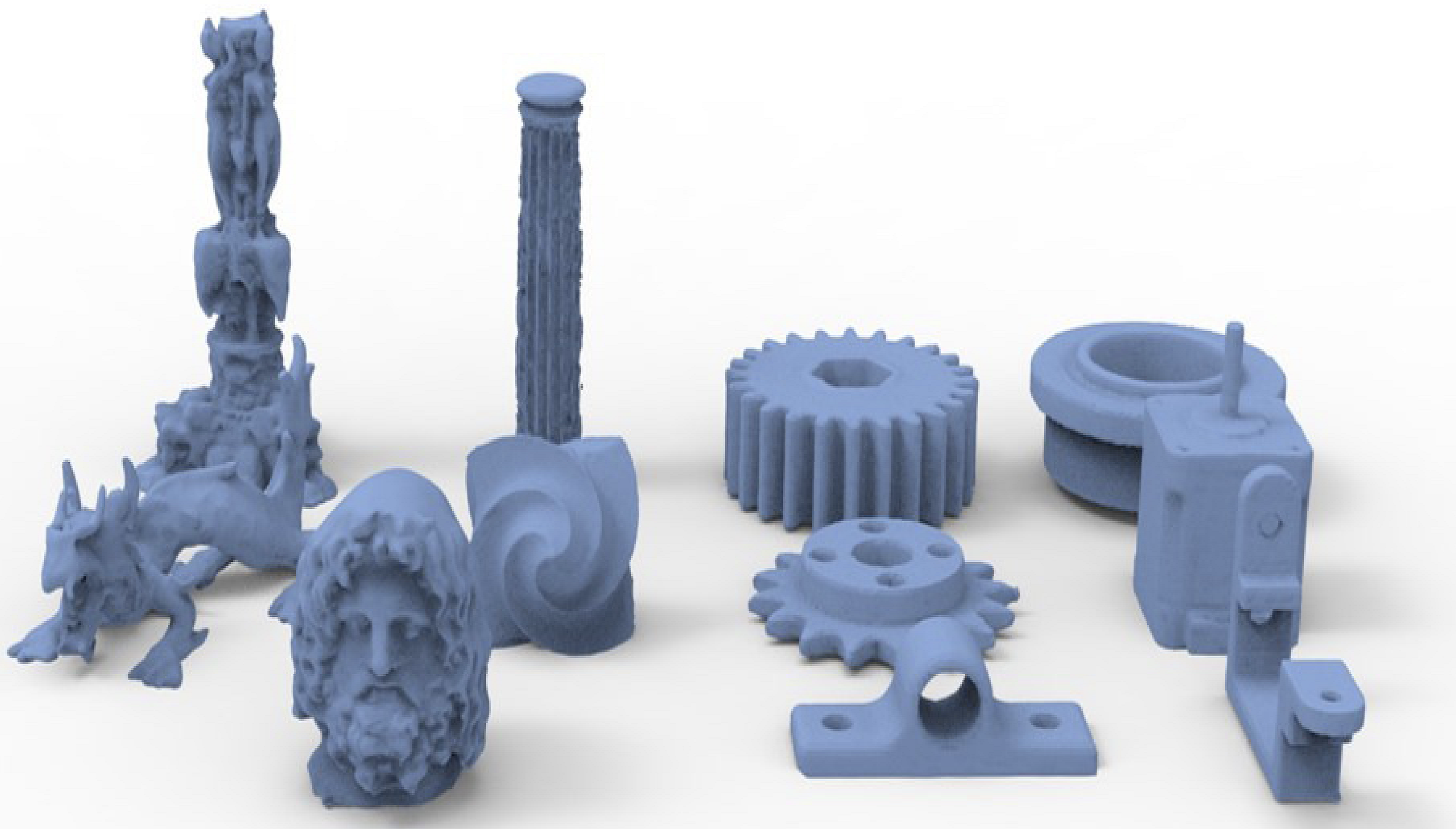
Junsheng Zhou*, Baorui Ma*, Shujuan Li, Yu-Shen Liu, Yi Fang, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024 project page | IEEE Xplore | arXiv | code We present CAP-UDF to represent shapes and scenes with arbitrary architecture by learning a Consistency-Aware unsigned distance function Progressively. |
|
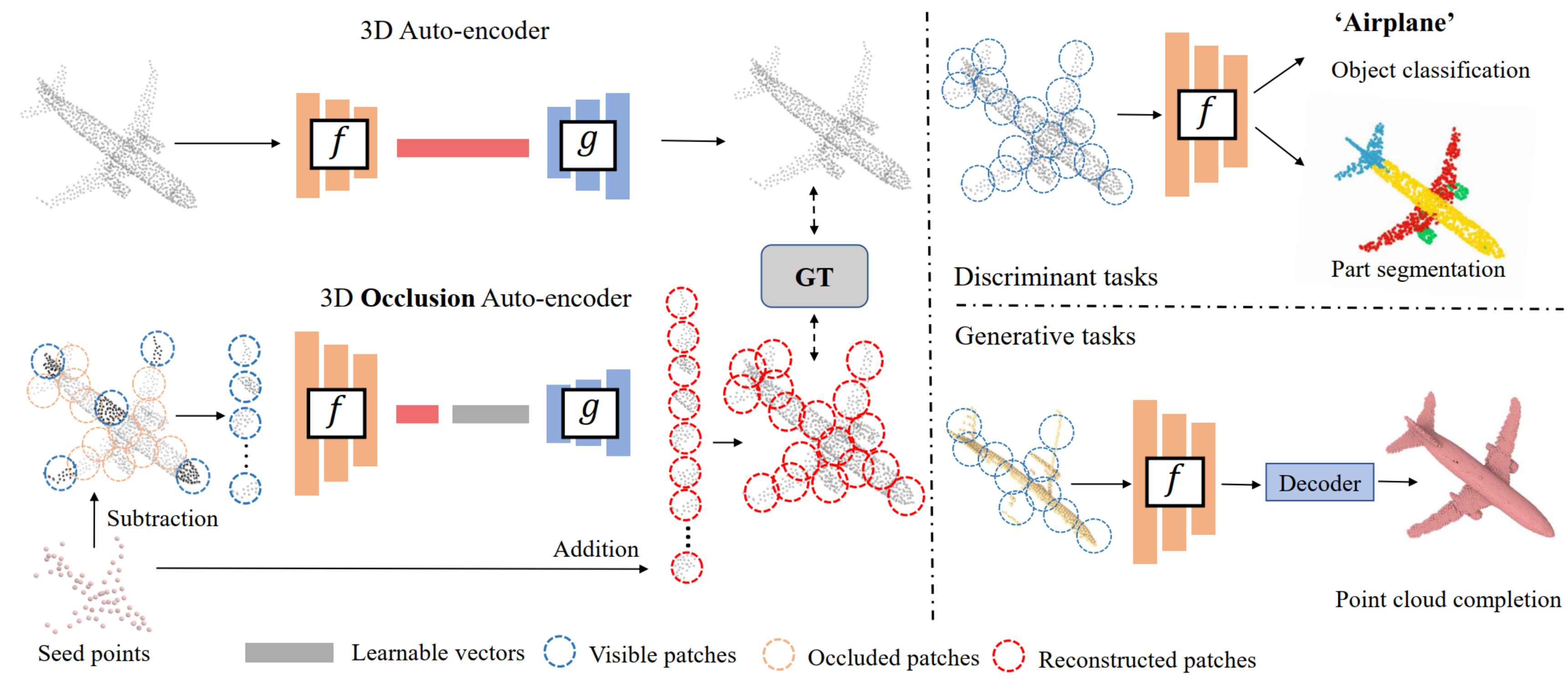
Junsheng Zhou*, Xin Wen*, Baorui Ma, Yu-Shen Liu, Yue Gao, Yi Fang, Zhizhong Han IEEE International Conference on Robotics and Automation (ICRA), 2024 (Oral) project page | arXiv | code We present 3D-OAE, a novel self-supervised point cloud representation learning framework which is highly efficient and can be further transferred to various downstream tasks. |
|
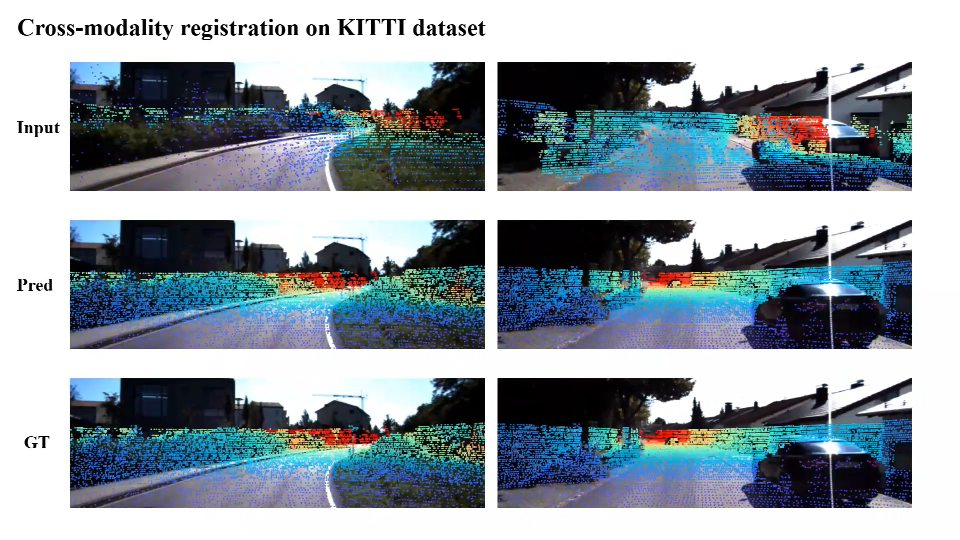
Junsheng Zhou*, Baorui Ma*, Wenyuan Zhang, Yi Fang, Yu-Shen Liu, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2023 (Spotlight) project page | arXiv | code We design a triplet network to learn VoxelPoint-to-Pixel matching via a differentiable probabilistic PnP solver. |
|
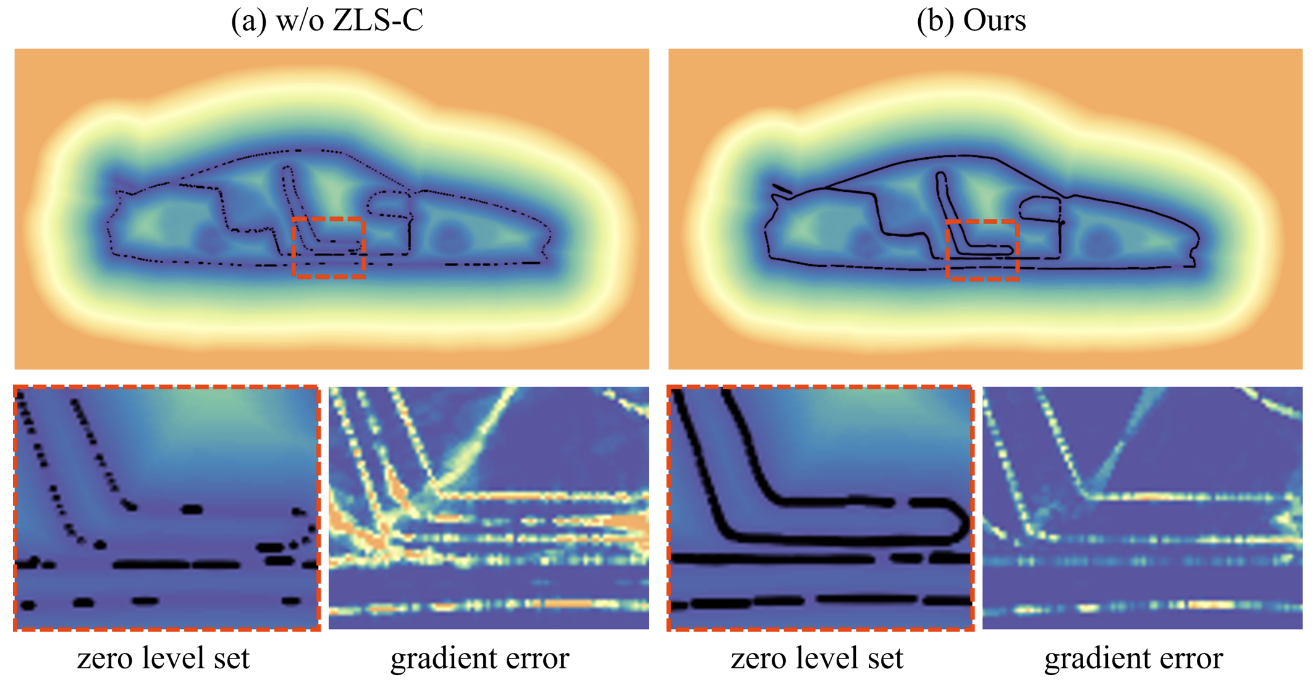
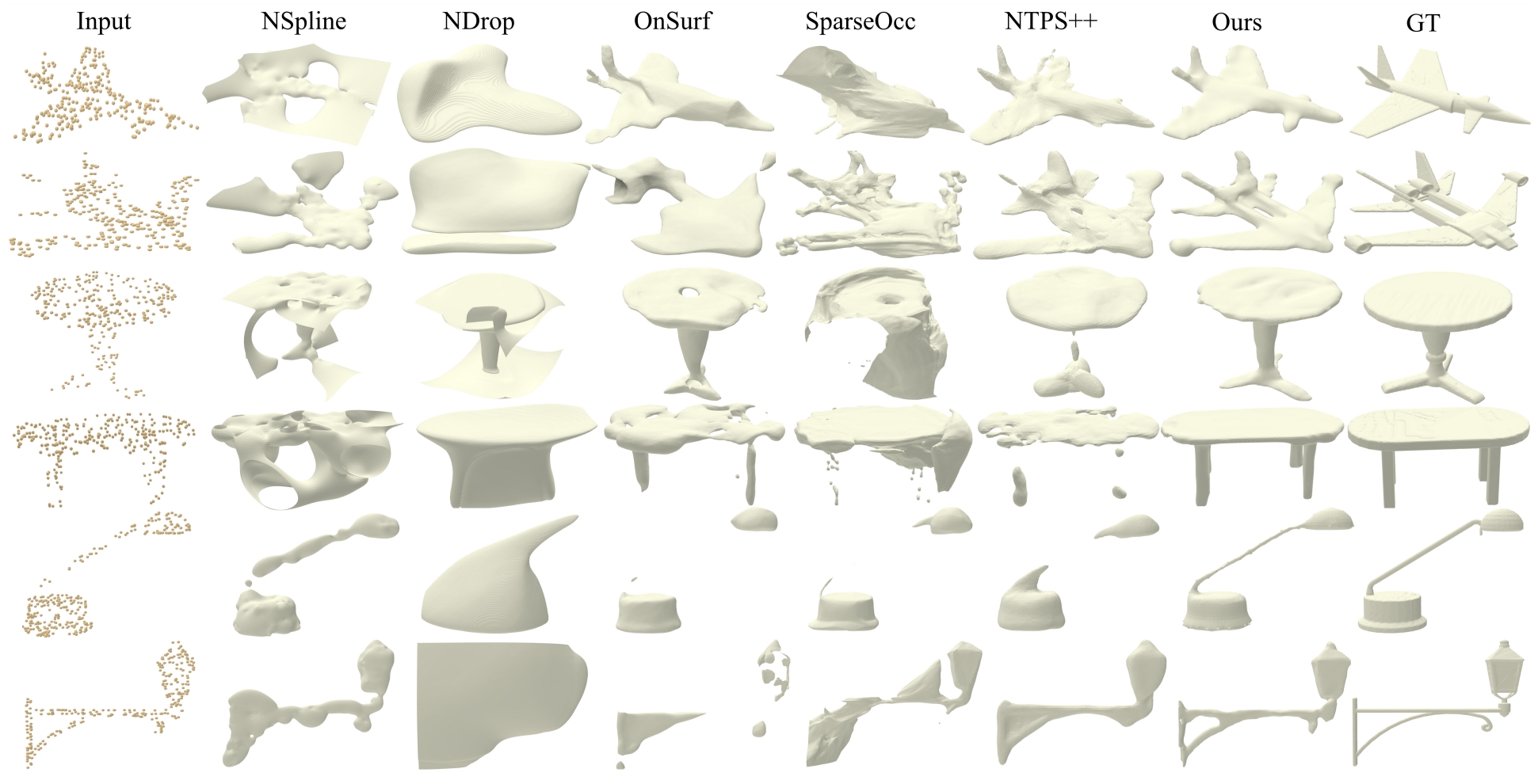
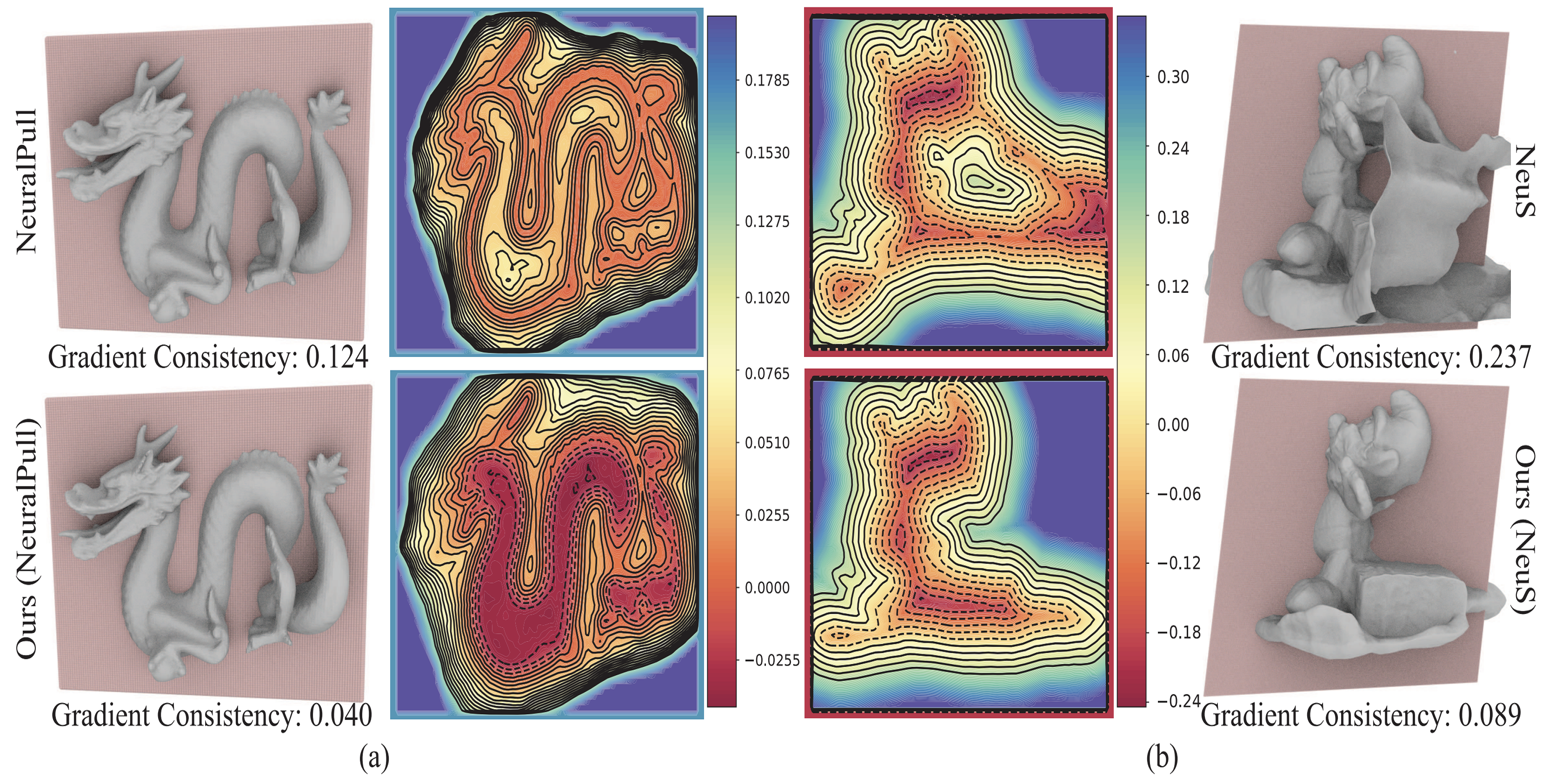
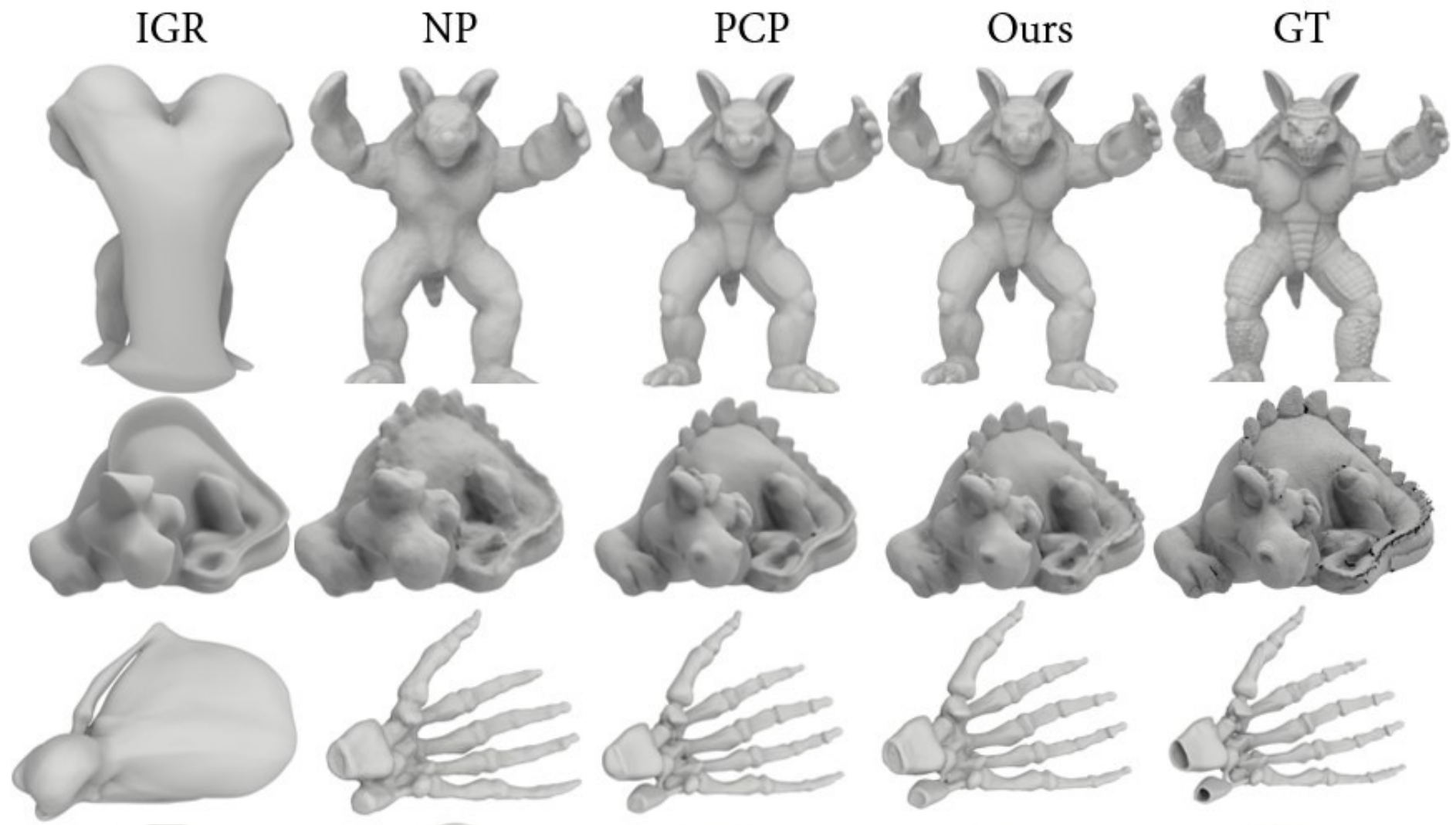
Junsheng Zhou*, Baorui Ma*, Shujuan Li, Yu-Shen Liu, Zhizhong Han IEEE/CVF International Conference on Computer Vision (ICCV), 2023 project page | arXiv | code We propose to guide the learning of zero level set in UDF using the rest non-zero level sets via a projection procedure. |
|
Junsheng Zhou*, Baorui Ma*, Yu-Shen Liu, Yi Fang, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS), 2022 project page | arXiv | code We present CAP-UDF to represent shapes and scenes with arbitrary architecture by learning a Consistency-Aware unsigned distance function Progressively. |

|
|
|
template adapted from this awesome website
|